 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximating the Riemannian Metric from Point Clouds via Manifold Moving Least Squares
Paper and Code
Jul 20, 2020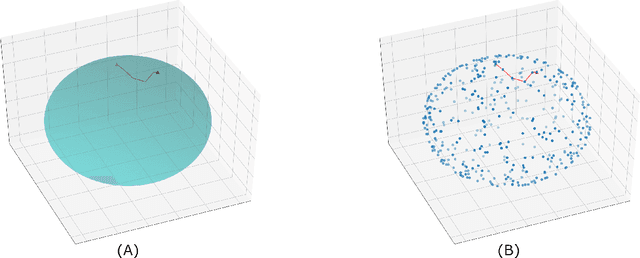

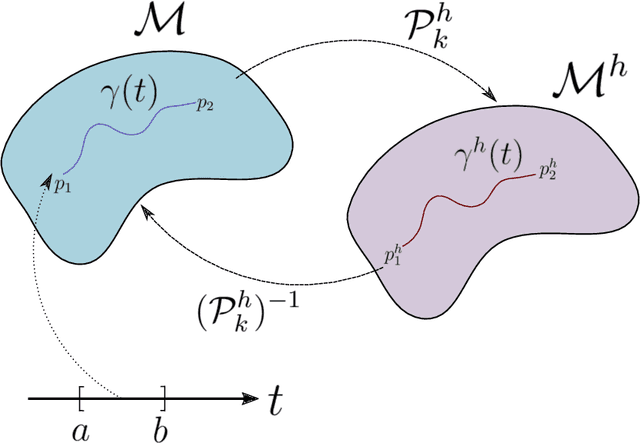

The approximation of both geodesic distances and shortest paths on point cloud sampled from an embedded submanifold $\mathcal{M}$ of Euclidean space has been a long-standing challenge in computational geometry. Given a sampling resolution parameter $ h $, state-of-the-art discrete methods yield $ O(h^2) $ approximations at most. In this paper, we investigate the convergence of such approximations made by Manifold Moving Least-Squares (Manifold-MLS), a method that constructs an approximating manifold $\mathcal{M}^h$ using information from a given point cloud that was developed by Sober \& Levin in 2019 . They showed that the Manifold-MLS procedure approximates the original manifold with approximation order of $ O(h^{k})$ provided that the original manifold $\mathcal{M} \in C^{k}$ is closed, i.e. $\mathcal{M}$ is a compact manifold without boundary. In this paper, we show that under the same conditions, the Riemannian metric of $ \mathcal{M}^h $ approximates the Riemannian metric of $ \mathcal{M}, $; i.e., $\mathcal{M}$ is nearly isometric to $\mathcal{M}^h$. Explicitly, given points $ p_1, p_2 \in \mathcal{M} $ with geodesic distance $ \rho_{\mathcal{M}}(p_1, p_2) $, we show that their corresponding points $ p_1^h, p_2^h \in \mathcal{M}^h $ have a geodesic distance of $ \rho_{\mathcal{M}^h}(p_1^h,p_2^h) = \rho_{\mathcal{M}}(p_1, p_2) + O(h^{k-1}) $. We then use this result, as well as the fact that $ \mathcal{M}^h $ can be sampled with any desired resolution, to devise a naive algorithm that yields approximate geodesic distances with rate of convergence $ O(h^{k-1}) $. We show the potential and the robustness to noise of the proposed method on some numerical simulations.