 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAPPLE: Adaptive Planner Parameter Learning from Evaluative Feedback
Paper and Code
Aug 22, 2021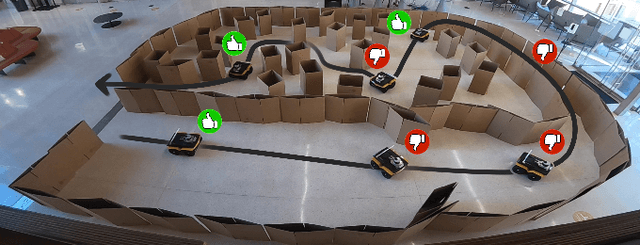
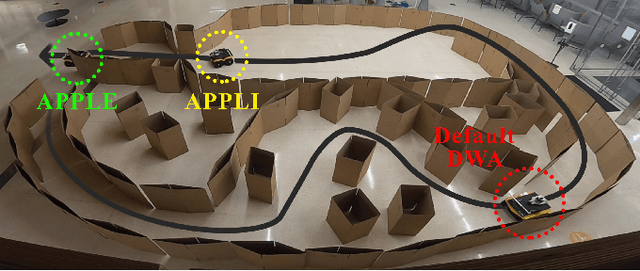
Classical autonomous navigation systems can control robots in a collision-free manner, oftentimes with verifiable safety and explainability. When facing new environments, however, fine-tuning of the system parameters by an expert is typically required before the system can navigate as expected. To alleviate this requirement, the recently-proposed Adaptive Planner Parameter Learning paradigm allows robots to \emph{learn} how to dynamically adjust planner parameters using a teleoperated demonstration or corrective interventions from non-expert users. However, these interaction modalities require users to take full control of the moving robot, which requires the users to be familiar with robot teleoperation. As an alternative, we introduce \textsc{apple}, Adaptive Planner Parameter Learning from \emph{Evaluative Feedback} (real-time, scalar-valued assessments of behavior), which represents a less-demanding modality of interaction. Simulated and physical experiments show \textsc{apple} can achieve better performance compared to the planner with static default parameters and even yield improvement over learned parameters from richer interaction modalities.