 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnytime Lane-Level Intersection Estimation Based on Trajectories
Paper and Code
Jun 06, 2019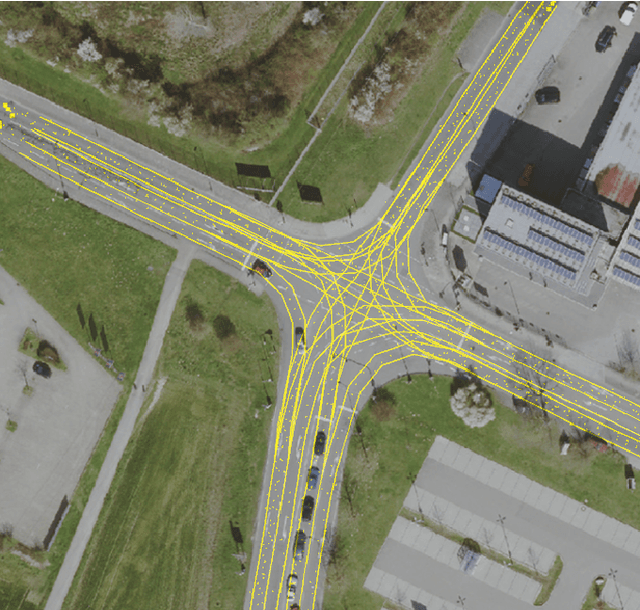
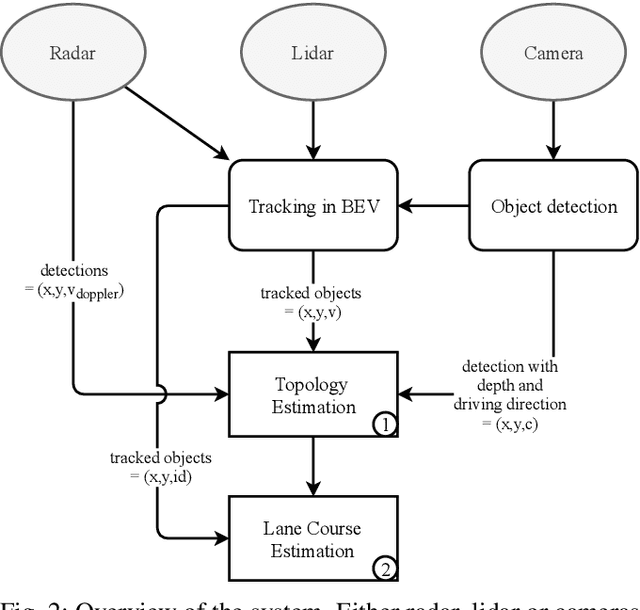
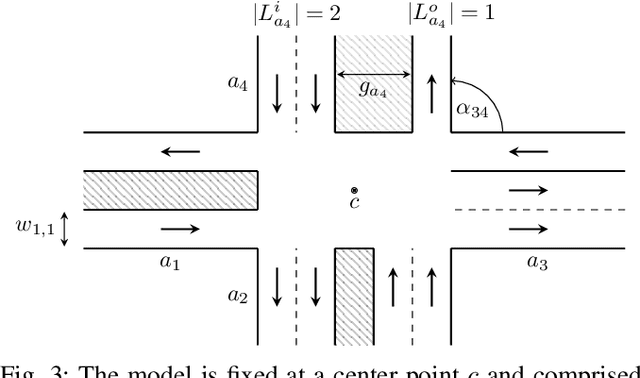
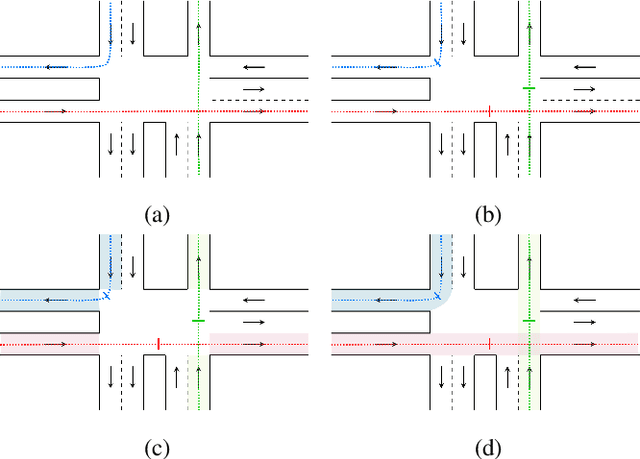
Estimating and understanding the current scene is an inevitable capability of automated vehicles. Usually, maps are used as prior for interpreting sensor measurements in order to drive safely. Only few approaches take into account that maps might be outdated and thereby lead to wrong assumptions on the environment. This work estimates a lane-level intersection topology without any map prior based on the trajectories of other traffic participants. We are able to deliver both a coarse lane-level topology as well as the lane course inside and outside of the intersection using Markov chain Monte Carlo sampling. The model is neither limited to a number of lanes or arms nor to the topology of the intersection. We present our results on an evaluation set on about 1000 intersections and achieve 99.9% accuracy on the topology estimation that takes only 73 ms, when utilizing tracked object detections. Estimating the precise lane course on the intersection achieves results on average deviating only 20 cm from the ground truth.