 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnytime and Efficient Coalition Formation with Spatial and Temporal Constraints
Paper and Code
Apr 02, 2020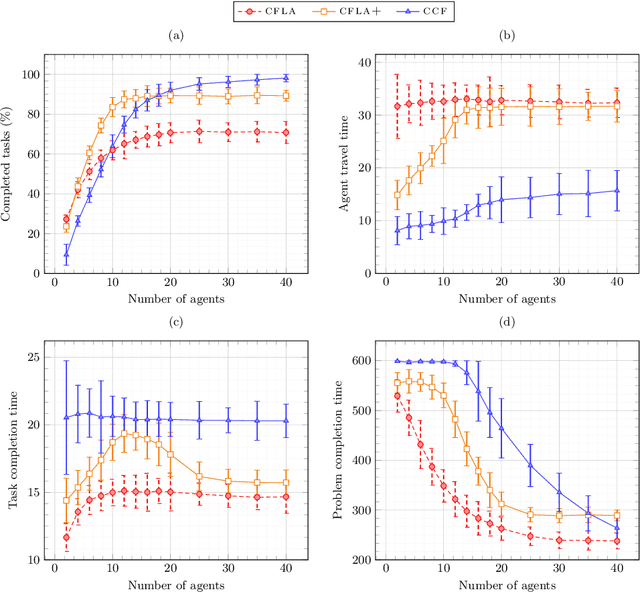
The Coalition Formation with Spatial and Temporal constraints Problem (CFSTP) is a multi-agent task allocation problem where the agents are cooperative and few, the tasks are many, spatially distributed, with deadlines and workloads, and the objective is to find a schedule that maximises the number of completed tasks. The current state-of-the-art CFSTP solver, the Coalition Formation with Look-Ahead (CFLA) algorithm, has two main limitations. First, its time complexity is quadratic with the number of tasks and exponential with the number of agents, which makes it not efficient. Second, its look-ahead technique is not effective in real-world scenarios, such as open multi-agent systems, where new tasks can appear at any time. Motivated by this, we propose an extension of CFLA, which we call Coalition Formation with Improved Look-Ahead (CFLA+). Since CFLA+ inherits the limitations of CFLA, we also develop a novel algorithm to solve the CFSTP, the first to be both anytime and efficient, which we call Cluster-based Coalition Formation (CCF). We empirically show that, in settings where the look-ahead technique is highly effective, CCF completes up to 20% (resp. 10%) more tasks than CFLA (resp. CFLA+) while being up to four orders of magnitude faster. Our results affirm CCF as the new state-of-the-art CFSTP solver.