 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalyzing Multiagent Interactions in Traffic Scenes via Topological Braids
Paper and Code
Sep 15, 2021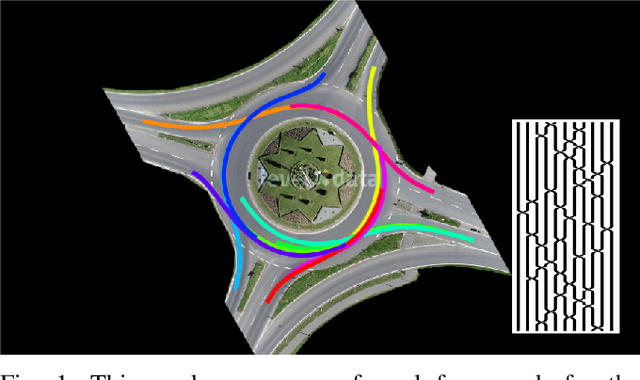

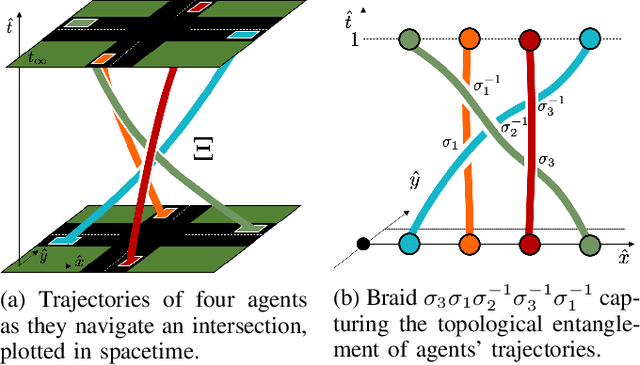
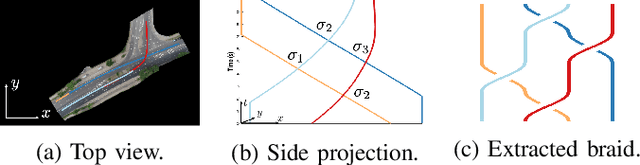
We focus on the problem of analyzing multiagent interactions in traffic domains. Understanding the space of behavior of real-world traffic may offer significant advantages for algorithmic design, data-driven methodologies, and benchmarking. However, the high dimensionality of the space and the stochasticity of human behavior may hinder the identification of important interaction patterns. Our key insight is that traffic environments feature significant geometric and temporal structure, leading to highly organized collective behaviors, often drawn from a small set of dominant modes. In this work, we propose a representation based on the formalism of topological braids that can summarize arbitrarily complex multiagent behavior into a compact object of dual geometric and symbolic nature, capturing critical events of interaction. This representation allows us to formally enumerate the space of outcomes in a traffic scene and characterize their complexity. We illustrate the value of the proposed representation in summarizing critical aspects of real-world traffic behavior through a case study on recent driving datasets. We show that despite the density of real-world traffic, observed behavior tends to follow highly organized patterns of low interaction. Our framework may be a valuable tool for evaluating the richness of driving datasets, but also for synthetically designing balanced training datasets or benchmarks.