Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalyze, Debug, Optimize: Real-Time Tracing for Perception and Mapping Systems in ROS 2
Paper and Code


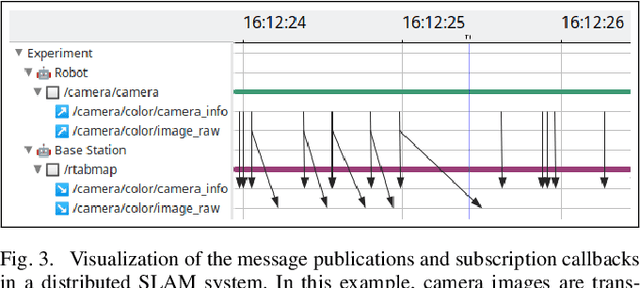

Perception and mapping systems are among the most computationally, memory, and bandwidth intensive software components in robotics. Therefore, analysis, debugging, and optimization are crucial to improve perception systems performance in real-time applications. However, standard approaches often depict a partial picture of the actual performance. Fortunately, instrumentation and tracing offer a great opportunity for detailed performance analysis of real-time systems. In this paper, we show how our novel open-source tracing tools and techniques for ROS 2 enable us to identify delays, bottlenecks and critical paths inside centralized, or distributed, perception and mapping systems.
View paper on