 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Overview of Multi-Object Estimation via Labeled Random Finite Set
Paper and Code
Sep 27, 2024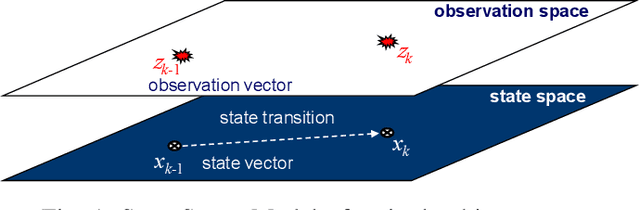
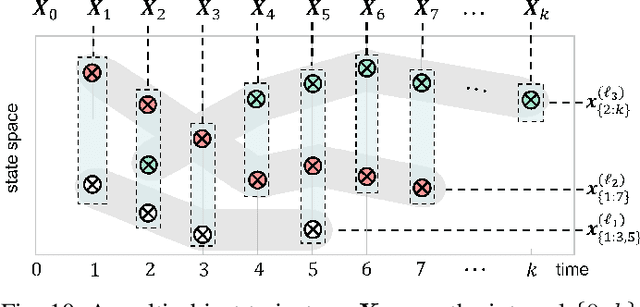
This article presents the Labeled Random Finite Set (LRFS) framework for multi-object systems-systems in which the number of objects and their states are unknown and vary randomly with time. In particular, we focus on state and trajectory estimation via a multi-object State Space Model (SSM) that admits principled tractable multi-object tracking filters/smoothers. Unlike the single-object counterpart, a time sequence of states does not necessarily represent the trajectory of a multi-object system. The LRFS formulation enables a time sequence of multi-object states to represent the multi-object trajectory that accommodates trajectory crossings and fragmentations. We present the basics of LRFS, covering a suite of commonly used models and mathematical apparatus (including the latest results not published elsewhere). Building on this, we outline the fundamentals of multi-object state space modeling and estimation using LRFS, which formally address object identities/trajectories, ancestries for spawning objects, and characterization of the uncertainty on the ensemble of objects (and their trajectories). Numerical solutions to multi-object SSM problems are inherently far more challenging than those in standard SSM. To bridge the gap between theory and practice, we discuss state-of-the-art implementations that address key computational bottlenecks in the number of objects, measurements, sensors, and scans.