 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn iterative scheme for feature based positioning using a weighted dissimilarity measure
Paper and Code
May 30, 2019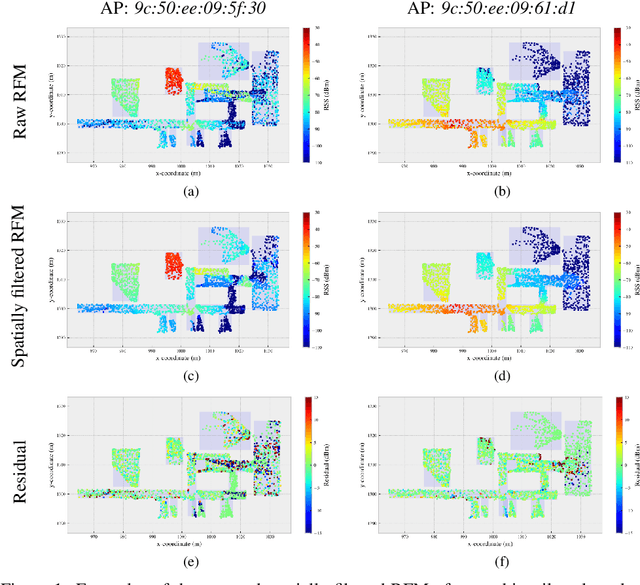
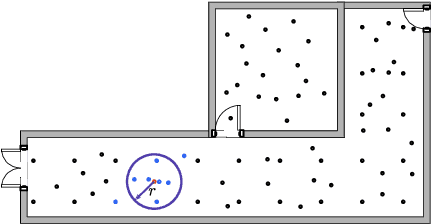

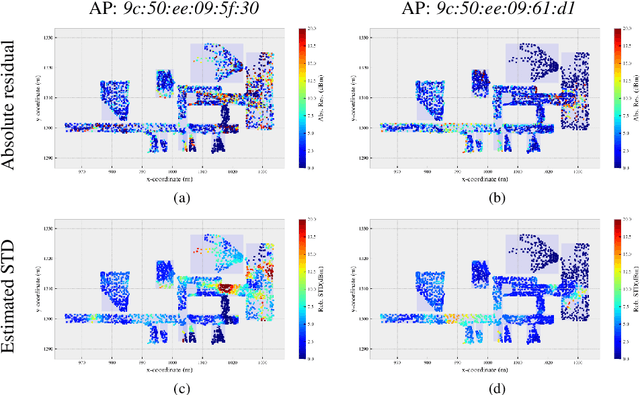
We propose an iterative scheme for feature-based positioning using a new weighted dissimilarity measure with the goal of reducing the impact of large errors among the measured or modeled features. The weights are computed from the location-dependent standard deviations of the features and stored as part of the reference fingerprint map (RFM). Spatial filtering and kernel smoothing of the kinematically collected raw data allow efficiently estimating the standard deviations during RFM generation. In the positioning stage, the weights control the contribution of each feature to the dissimilarity measure, which in turn quantifies the difference between the set of online measured features and the fingerprints stored in the RFM. Features with little variability contribute more to the estimated position than features with high variability. Iterations are necessary because the variability depends on the location, and the location is initially unknown when estimating the position. Using real WiFi signal strength data from extended test measurements with ground truth in an office building, we show that the standard deviations of these features vary considerably within the region of interest and are neither simple functions of the signal strength nor of the distances from the corresponding access points. This is the motivation to include the empirical standard deviations in the RFM. We then analyze the deviations of the estimated positions with and without the location-dependent weighting. In the present example the maximum radial positioning error from ground truth are reduced by 40% comparing to kNN without the weighted dissimilarity measure.