 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Information-Theoretic Approach to Persistent Environment Monitoring Through Low Rank Model Based Planning and Prediction
Paper and Code
Sep 02, 2020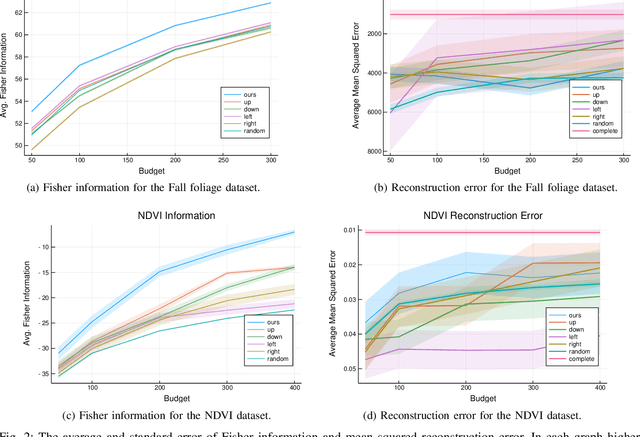
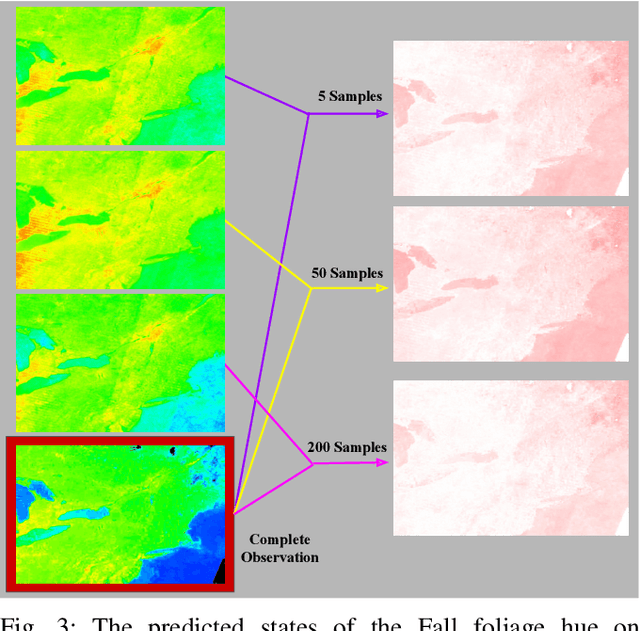
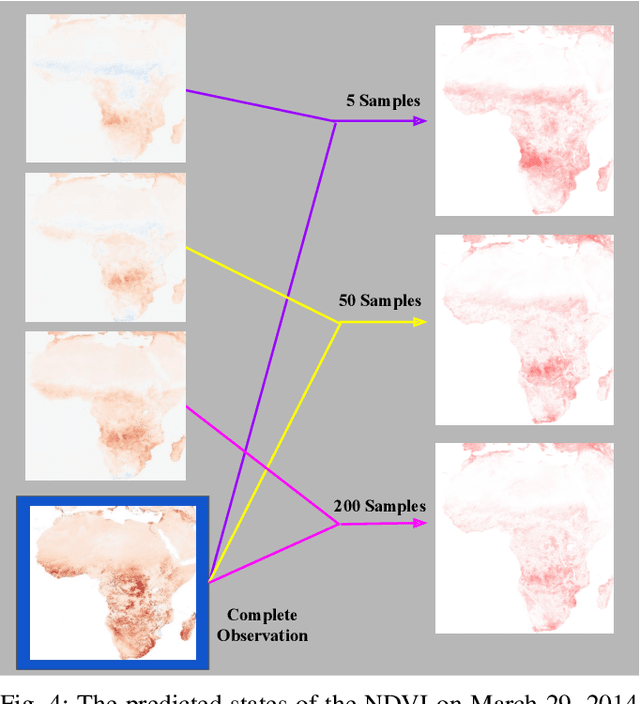
Robots can be used to collect environmental data in regions that are difficult for humans to traverse. However, limitations remain in the size of region that a robot can directly observe per unit time. We introduce a method for selecting a limited number of observation points in a large region, from which we can predict the state of unobserved points in the region. We combine a low rank model of a target attribute with an information-maximizing path planner to predict the state of the attribute throughout a region. Our approach is agnostic to the choice of target attribute and robot monitoring platform. We evaluate our method in simulation on two real-world environment datasets, each containing observations from one to two million possible sampling locations. We compare against a random sampler and four variations of a baseline sampler from the ecology literature. Our method outperforms the baselines in terms of average Fisher information gain per samples taken and performs comparably for average reconstruction error in most trials.