 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Empirical Comparison of Off-policy Prediction Learning Algorithms on the Collision Task
Paper and Code
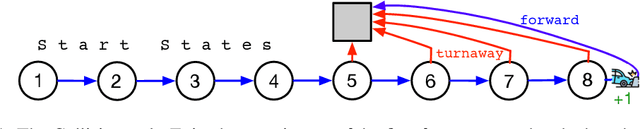
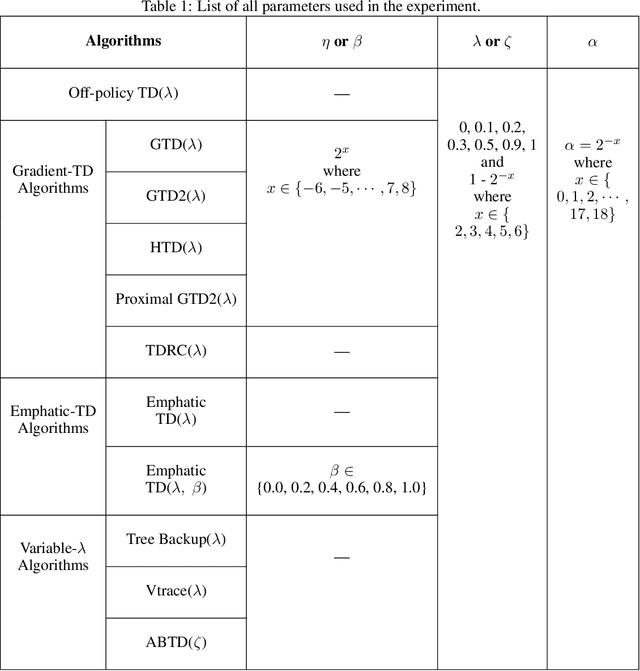
Off-policy prediction -- learning the value function for one policy from data generated while following another policy -- is one of the most challenging subproblems in reinforcement learning. This paper presents empirical results with eleven prominent off-policy learning algorithms that use linear function approximation: five Gradient-TD methods, two Emphatic-TD methods, Off-policy TD($\lambda$), Vtrace, and versions of Tree Backup and ABQ modified to apply to a prediction setting. Our experiments used the Collision task, a small idealized off-policy problem analogous to that of an autonomous car trying to predict whether it will collide with an obstacle. We assessed the performance of the algorithms according to their learning rate, asymptotic error level, and sensitivity to step-size and bootstrapping parameters. By these measures, the eleven algorithms can be partially ordered on the Collision task. In the top tier, the two Emphatic-TD algorithms learned the fastest, reached the lowest errors, and were robust to parameter settings. In the middle tier, the five Gradient-TD algorithms and Off-policy TD($\lambda$) were more sensitive to the bootstrapping parameter. The bottom tier comprised Vtrace, Tree Backup, and ABQ; these algorithms were no faster and had higher asymptotic error than the others. Our results are definitive for this task, though of course experiments with more tasks are needed before an overall assessment of the algorithms' merits can be made.