 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Empirical Bayes Analysis of Vehicle Trajectory Models
Paper and Code
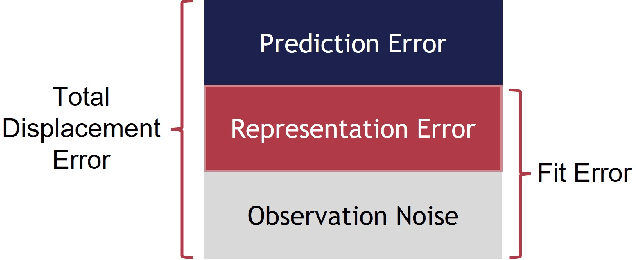
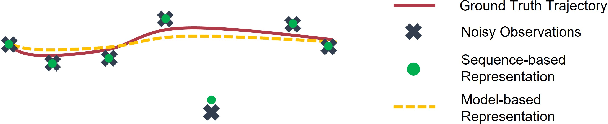
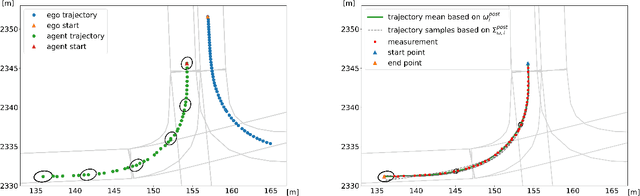
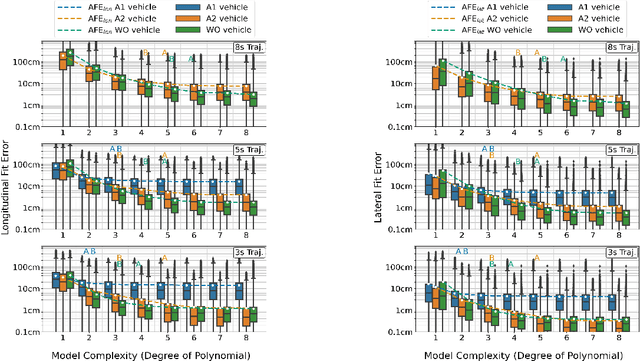
We present an in-depth empirical analysis of the trade-off between model complexity and representation error in modelling vehicle trajectories. Analyzing several large public datasets, we show that simple linear models do represent realworld trajectories with high fidelity over relevant time scales at very moderate model complexity. This finding allows the formulation of trajectory tracking and prediction as a Bayesian filtering problem. Using an Empirical Bayes approach, we estimate prior distributions over model parameters from the data that inform the motion models necessary in the trajectory tracking problem and that can help regularize prediction models. We argue for the use of linear models in trajectory prediction tasks as their representation error is much smaller than the typical epistemic uncertainty in this task.