 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn advantage actor-critic algorithm for robotic motion planning in dense and dynamic scenarios
Paper and Code
Feb 05, 2021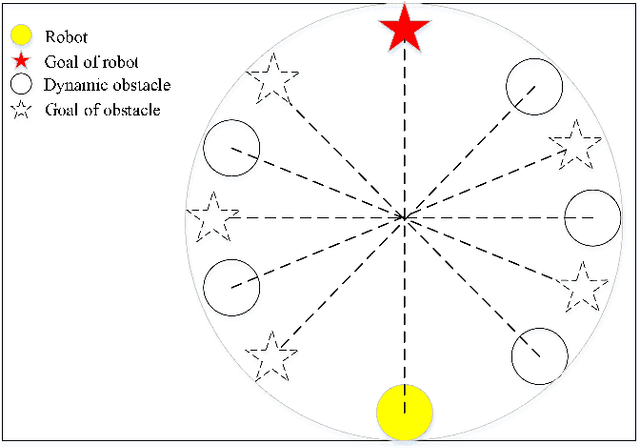


Intelligent robots provide a new insight into efficiency improvement in industrial and service scenarios to replace human labor. However, these scenarios include dense and dynamic obstacles that make motion planning of robots challenging. Traditional algorithms like A* can plan collision-free trajectories in static environment, but their performance degrades and computational cost increases steeply in dense and dynamic scenarios. Optimal-value reinforcement learning algorithms (RL) can address these problems but suffer slow speed and instability in network convergence. Network of policy gradient RL converge fast in Atari games where action is discrete and finite, but few works have been done to address problems where continuous actions and large action space are required. In this paper, we modify existing advantage actor-critic algorithm and suit it to complex motion planning, therefore optimal speeds and directions of robot are generated. Experimental results demonstrate that our algorithm converges faster and stable than optimal-value RL. It achieves higher success rate in motion planning with lesser processing time for robot to reach its goal.