 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Adaptive Framework for Reliable Trajectory Following in Changing-Contact Robot Manipulation Tasks
Paper and Code
Nov 15, 2021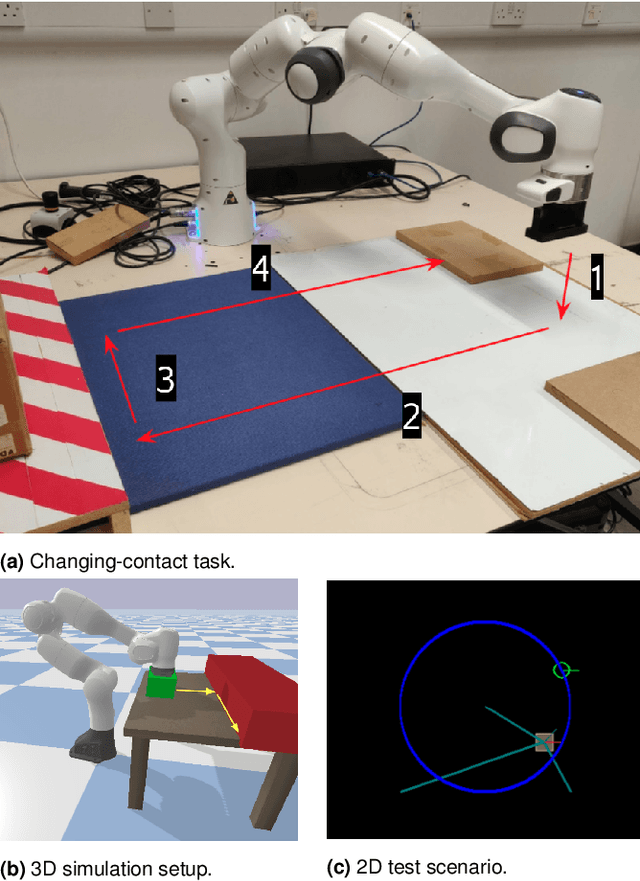
We describe a framework for changing-contact robot manipulation tasks that require the robot to make and break contacts with objects and surfaces. The discontinuous interaction dynamics of such tasks make it difficult to construct and use a single dynamics model or control strategy, and the highly non-linear nature of the dynamics during contact changes can be damaging to the robot and the objects. We present an adaptive control framework that enables the robot to incrementally learn to predict contact changes in a changing contact task, learn the interaction dynamics of the piece-wise continuous system, and provide smooth and accurate trajectory tracking using a task-space variable impedance controller. We experimentally compare the performance of our framework against that of representative control methods to establish that the adaptive control and incremental learning components of our framework are needed to achieve smooth control in the presence of discontinuous dynamics in changing-contact robot manipulation tasks.