 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn A* Curriculum Approach to Reinforcement Learning for RGBD Indoor Robot Navigation
Paper and Code
Jan 05, 2021
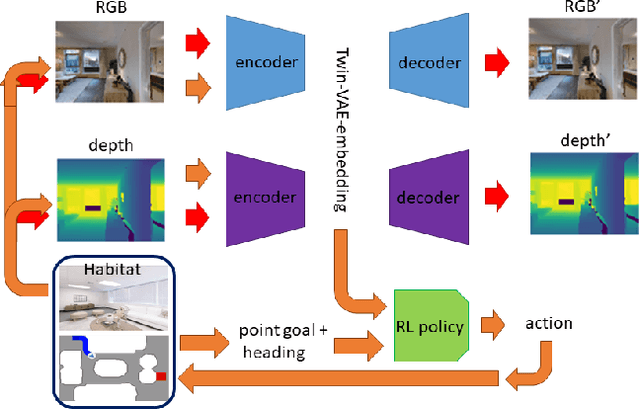
Training robots to navigate diverse environments is a challenging problem as it involves the confluence of several different perception tasks such as mapping and localization, followed by optimal path-planning and control. Recently released photo-realistic simulators such as Habitat allow for the training of networks that output control actions directly from perception: agents use Deep Reinforcement Learning (DRL) to regress directly from the camera image to a control output in an end-to-end fashion. This is data-inefficient and can take several days to train on a GPU. Our paper tries to overcome this problem by separating the training of the perception and control neural nets and increasing the path complexity gradually using a curriculum approach. Specifically, a pre-trained twin Variational AutoEncoder (VAE) is used to compress RGBD (RGB & depth) sensing from an environment into a latent embedding, which is then used to train a DRL-based control policy. A*, a traditional path-planner is used as a guide for the policy and the distance between start and target locations is incrementally increased along the A* route, as training progresses. We demonstrate the efficacy of the proposed approach, both in terms of increased performance and decreased training times for the PointNav task in the Habitat simulation environment. This strategy of improving the training of direct-perception based DRL navigation policies is expected to hasten the deployment of robots of particular interest to industry such as co-bots on the factory floor and last-mile delivery robots.