 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAligning Language Models with Preferences through f-divergence Minimization
Paper and Code
Feb 16, 2023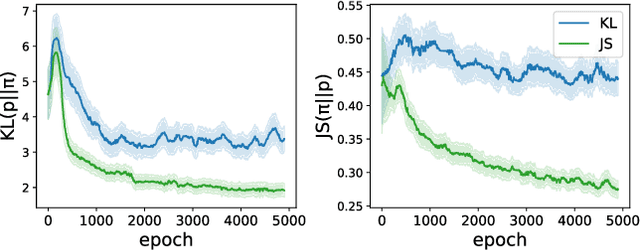



Aligning language models with preferences can be posed as approximating a target distribution representing some desired behavior. Existing approaches differ both in the functional form of the target distribution and the algorithm used to approximate it. For instance, Reinforcement Learning from Human Feedback (RLHF) corresponds to minimizing a reverse KL from an implicit target distribution arising from a KL penalty in the objective. On the other hand, Generative Distributional Control (GDC) has an explicit target distribution and minimizes a forward KL from it using the Distributional Policy Gradient (DPG) algorithm. In this paper, we propose a new approach, f-DPG, which allows the use of any f-divergence to approximate any target distribution. f-DPG unifies both frameworks (RLHF, GDC) and the approximation methods (DPG, RL with KL penalties). We show the practical benefits of various choices of divergence objectives and demonstrate that there is no universally optimal objective but that different divergences are good for approximating different targets. For instance, we discover that for GDC, the Jensen-Shannon divergence frequently outperforms forward KL divergence by a wide margin, leading to significant improvements over prior work.