 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgent-Based Perception of an Environment in an Emergency Situation
Paper and Code
Apr 03, 2008
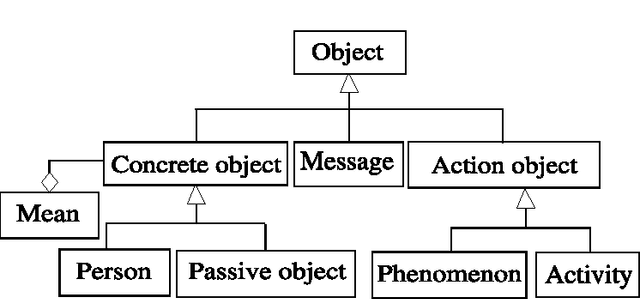

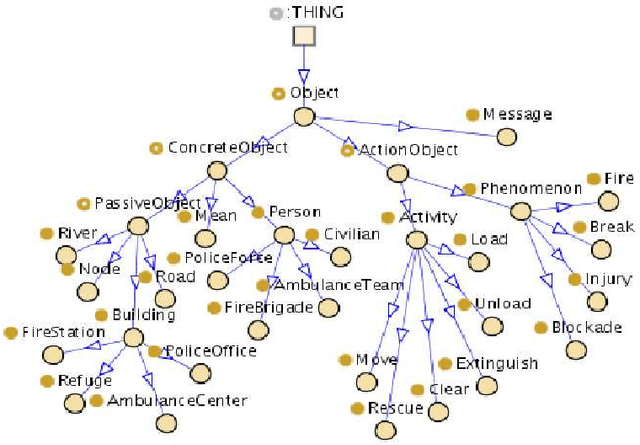
We are interested in the problem of multiagent systems development for risk detecting and emergency response in an uncertain and partially perceived environment. The evaluation of the current situation passes by three stages inside the multiagent system. In a first time, the situation is represented in a dynamic way. The second step, consists to characterise the situation and finally, it is compared with other similar known situations. In this paper, we present an information modelling of an observed environment, that we have applied on the RoboCupRescue Simulation System. Information coming from the environment are formatted according to a taxonomy and using semantic features. The latter are defined thanks to a fine ontology of the domain and are managed by factual agents that aim to represent dynamically the current situation.