 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Constraint Learning for Structured Prediction
Paper and Code

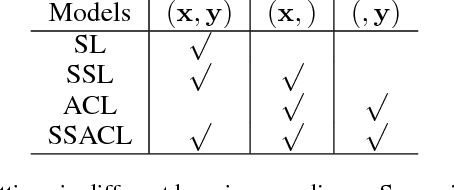
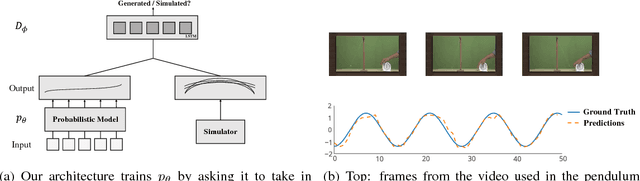
Constraint-based learning reduces the burden of collecting labels by having users specify general properties of structured outputs, such as constraints imposed by physical laws. We propose a novel framework for simultaneously learning these constraints and using them for supervision, bypassing the difficulty of using domain expertise to manually specify constraints. Learning requires a black-box simulator of structured outputs, which generates valid labels, but need not model their corresponding inputs or the input-label relationship. At training time, we constrain the model to produce outputs that cannot be distinguished from simulated labels by adversarial training. Providing our framework with a small number of labeled inputs gives rise to a new semi-supervised structured prediction model; we evaluate this model on multiple tasks --- tracking, pose estimation and time series prediction --- and find that it achieves high accuracy with only a small number of labeled inputs. In some cases, no labels are required at all.