 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Learning to Speed-Up Control of Prosthetic Hands: a Few Things Everybody Should Know
Paper and Code
Feb 27, 2017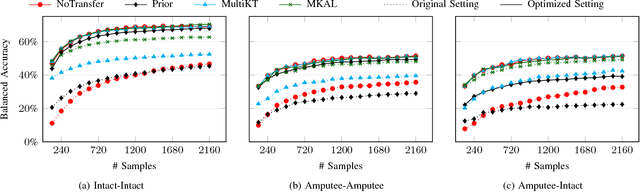
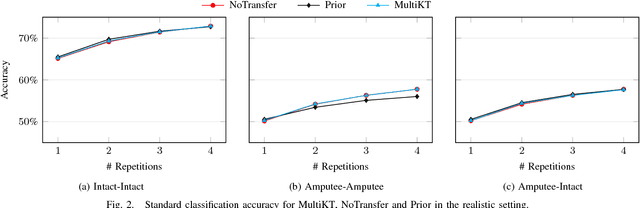
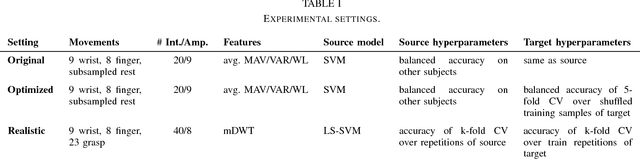
A number of studies have proposed to use domain adaptation to reduce the training efforts needed to control an upper-limb prosthesis exploiting pre-trained models from prior subjects. These studies generally reported impressive reductions in the required number of training samples to achieve a certain level of accuracy for intact subjects. We further investigate two popular methods in this field to verify whether this result equally applies to amputees. Our findings show instead that this improvement can largely be attributed to a suboptimal hyperparameter configuration. When hyperparameters are appropriately tuned, the standard approach that does not exploit prior information performs on par with the more complicated transfer learning algorithms. Additionally, earlier studies erroneously assumed that the number of training samples relates proportionally to the efforts required from the subject. However, a repetition of a movement is the atomic unit for subjects and the total number of repetitions should therefore be used as reliable measure for training efforts. Also when correcting for this mistake, we do not find any performance increase due to the use of prior models.