 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Joint Optimization for 3D Reconstruction with Differentiable Rendering
Paper and Code
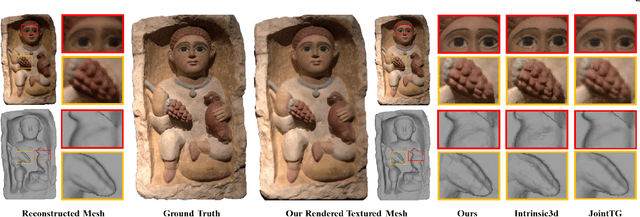

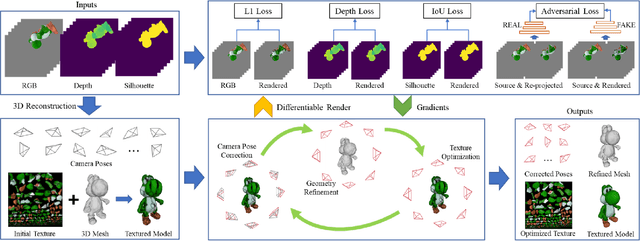
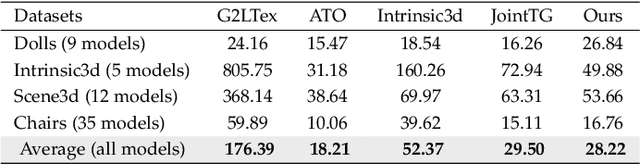
Due to inevitable noises introduced during scanning and quantization, 3D reconstruction via RGB-D sensors suffers from errors both in geometry and texture, leading to artifacts such as camera drifting, mesh distortion, texture ghosting, and blurriness. Given an imperfect reconstructed 3D model, most previous methods have focused on the refinement of either geometry, texture, or camera pose. Or different optimization schemes and objectives for optimizing each component have been used in previous joint optimization methods, forming a complicated system. In this paper, we propose a novel optimization approach based on differentiable rendering, which integrates the optimization of camera pose, geometry, and texture into a unified framework by enforcing consistency between the rendered results and the corresponding RGB-D inputs. Based on the unified framework, we introduce a joint optimization approach to fully exploit the inter-relationships between geometry, texture, and camera pose, and describe an adaptive interleaving strategy to improve optimization stability and efficiency. Using differentiable rendering, an image-level adversarial loss is applied to further improve the 3D model, making it more photorealistic. Experiments on synthetic and real data using quantitative and qualitative evaluation demonstrated the superiority of our approach in recovering both fine-scale geometry and high-fidelity texture.