 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Affinity for Associations in Multi-Target Multi-Camera Tracking
Paper and Code
Dec 14, 2021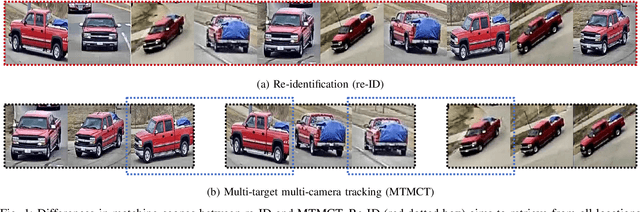



Data associations in multi-target multi-camera tracking (MTMCT) usually estimate affinity directly from re-identification (re-ID) feature distances. However, we argue that it might not be the best choice given the difference in matching scopes between re-ID and MTMCT problems. Re-ID systems focus on global matching, which retrieves targets from all cameras and all times. In contrast, data association in tracking is a local matching problem, since its candidates only come from neighboring locations and time frames. In this paper, we design experiments to verify such misfit between global re-ID feature distances and local matching in tracking, and propose a simple yet effective approach to adapt affinity estimations to corresponding matching scopes in MTMCT. Instead of trying to deal with all appearance changes, we tailor the affinity metric to specialize in ones that might emerge during data associations. To this end, we introduce a new data sampling scheme with temporal windows originally used for data associations in tracking. Minimizing the mismatch, the adaptive affinity module brings significant improvements over global re-ID distance, and produces competitive performance on CityFlow and DukeMTMC datasets.