 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Tapping via Gaussian Process for Efficient Unknown Object Surface Reconstruction
Paper and Code
Oct 18, 2021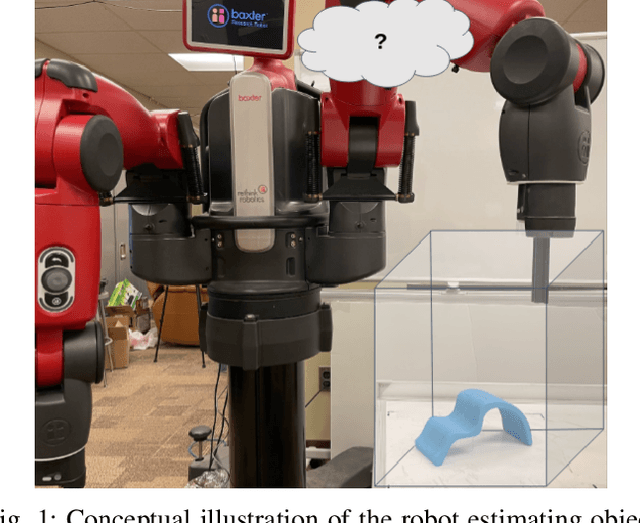
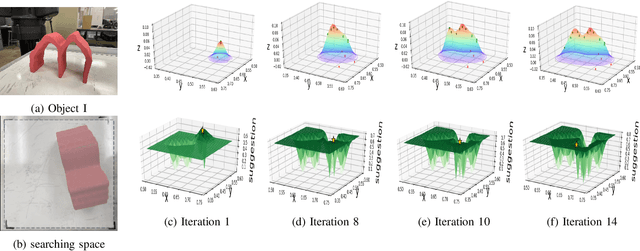
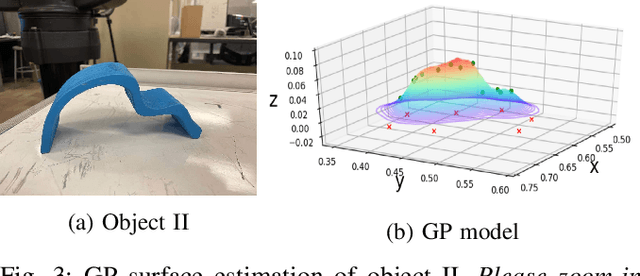
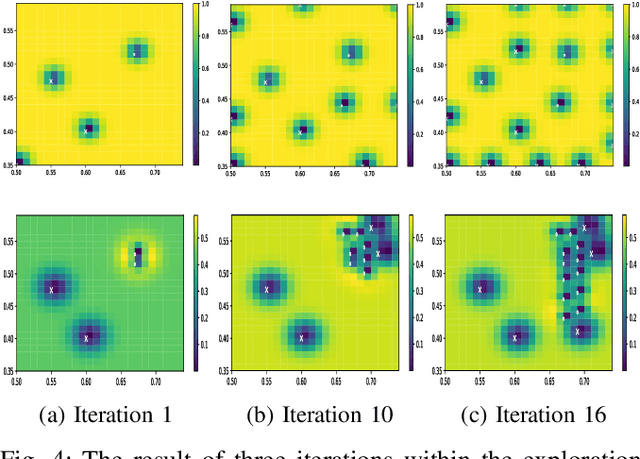
Object surface reconstruction brings essential benefits to robot grasping, object recognition, and object manipulation. When measuring the surface distribution of an unknown object by tapping, the greatest challenge is to select tapping positions efficiently and accurately without prior knowledge of object region. Given a searching range, we propose an active exploration method, to efficiently and intelligently guide the tapping to learn the object surface without exhaustive and unnecessary off-surface tapping. We analyze the performance of our approach in modeling object surfaces within an exploration range larger than the object using a robot arm equipped with an end-of-arm tapping tool to execute tapping motions. Experimental results show that the approach successfully models the surface of unknown objects with a relative 59% improvement in the proportion of necessary taps among all taps compared with state-of-art performance.