 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAction Model Acquisition using LSTM
Paper and Code
Oct 03, 2018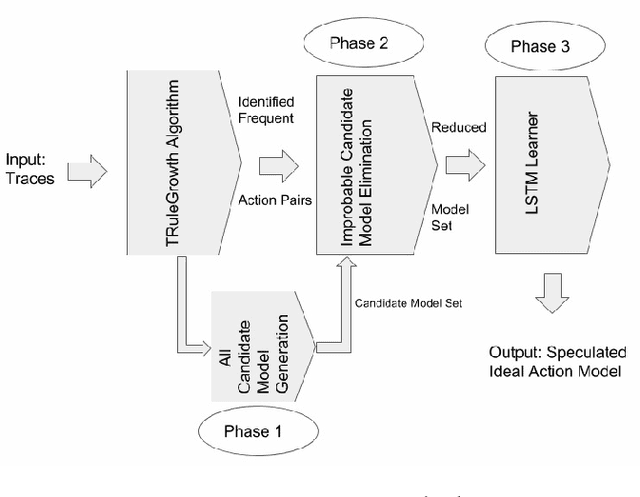
In the field of Automated Planning and Scheduling (APS), intelligent agents by virtue require an action model (blueprints of actions whose interleaved executions effectuates transitions of the system state) in order to plan and solve real world problems. It is, however, becoming increasingly cumbersome to codify this model, and is more efficient to learn it from observed plan execution sequences (training data). While the underlying objective is to subsequently plan from this learnt model, most approaches fall short as anything less than a flawless reconstruction of the underlying model renders it unusable in certain domains. This work presents a novel approach using long short-term memory (LSTM) techniques for the acquisition of the underlying action model. We use the sequence labelling capabilities of LSTMs to isolate from an exhaustive model set a model identical to the one responsible for producing the training data. This isolation capability renders our approach as an effective one.