 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate Ground-Truth Depth Image Generation via Overfit Training of Point Cloud Registration using Local Frame Sets
Paper and Code
Jul 14, 2022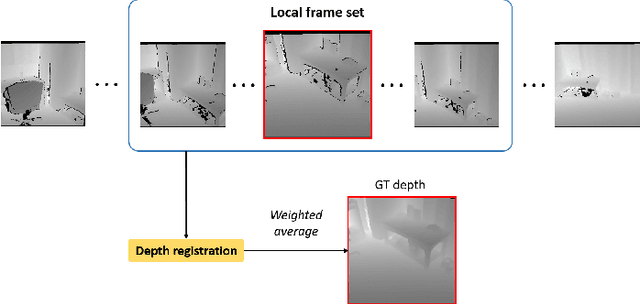
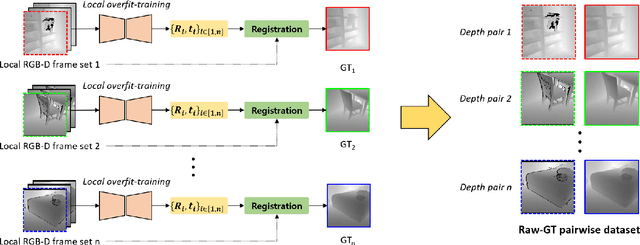
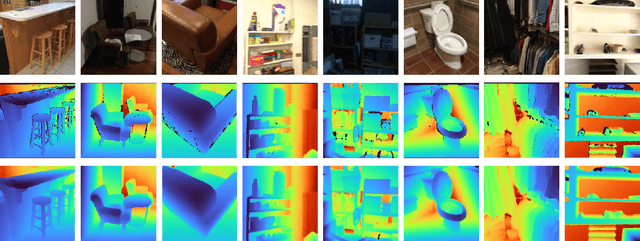
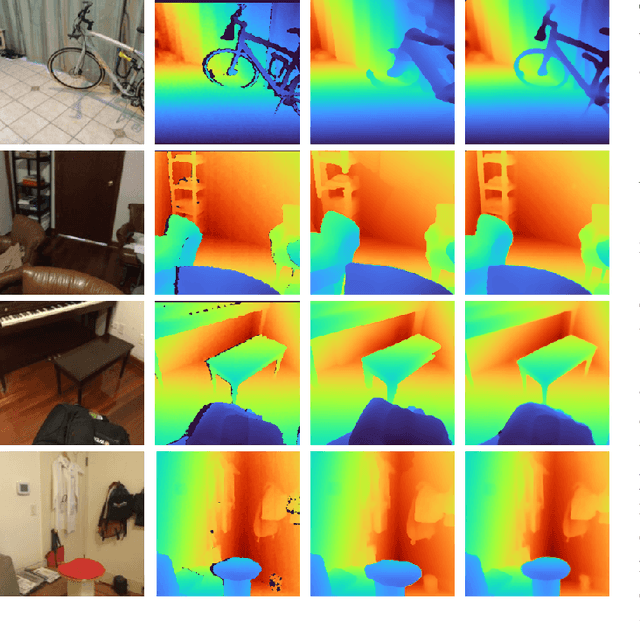
Accurate three-dimensional perception is a fundamental task in several computer vision applications. Recently, commercial RGB-depth (RGB-D) cameras have been widely adopted as single-view depth-sensing devices owing to their efficient depth-sensing abilities. However, the depth quality of most RGB-D sensors remains insufficient owing to the inherent noise from a single-view environment. Recently, several studies have focused on the single-view depth enhancement of RGB-D cameras. Recent research has proposed deep-learning-based approaches that typically train networks using high-quality supervised depth datasets, which indicates that the quality of the ground-truth (GT) depth dataset is a top-most important factor for accurate system; however, such high-quality GT datasets are difficult to obtain. In this study, we developed a novel method for high-quality GT depth generation based on an RGB-D stream dataset. First, we defined consecutive depth frames in a local spatial region as a local frame set. Then, the depth frames were aligned to a certain frame in the local frame set using an unsupervised point cloud registration scheme. The registration parameters were trained based on an overfit-training scheme, which was primarily used to construct a single GT depth image for each frame set. The final GT depth dataset was constructed using several local frame sets, and each local frame set was trained independently. The primary advantage of this study is that a high-quality GT depth dataset can be constructed under various scanning environments using only the RGB-D stream dataset. Moreover, our proposed method can be used as a new benchmark GT dataset for accurate performance evaluations. We evaluated our GT dataset on previously benchmarked GT depth datasets and demonstrated that our method is superior to state-of-the-art depth enhancement frameworks.