 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating the Convergence of Human-in-the-Loop Reinforcement Learning with Counterfactual Explanations
Paper and Code
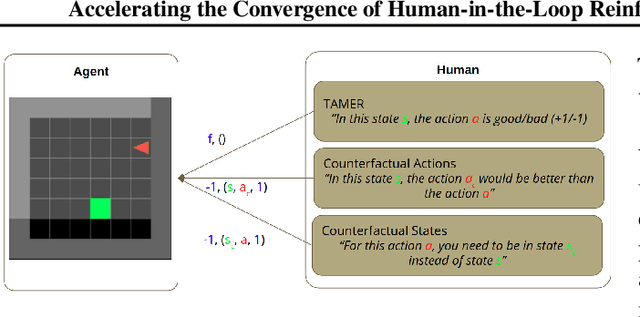
The capability to interactively learn from human feedback would enable robots in new social settings. For example, novice users could train service robots in new tasks naturally and interactively. Human-in-the-loop Reinforcement Learning (HRL) addresses this issue by combining human feedback and reinforcement learning (RL) techniques. State-of-the-art interactive learning techniques suffer from slow convergence, thus leading to a frustrating experience for the human. This work approaches this problem by extending the existing TAMER Framework with the possibility to enhance human feedback with two different types of counterfactual explanations. We demonstrate our extensions' success in improving the convergence, especially in the crucial early phases of the training.