 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating Integrated Task and Motion Planning with Neural Feasibility Checking
Paper and Code
Mar 20, 2022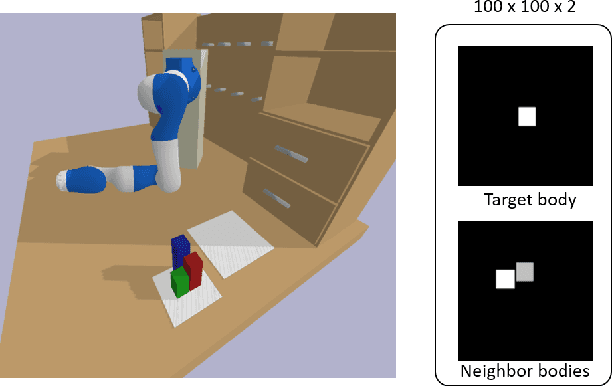
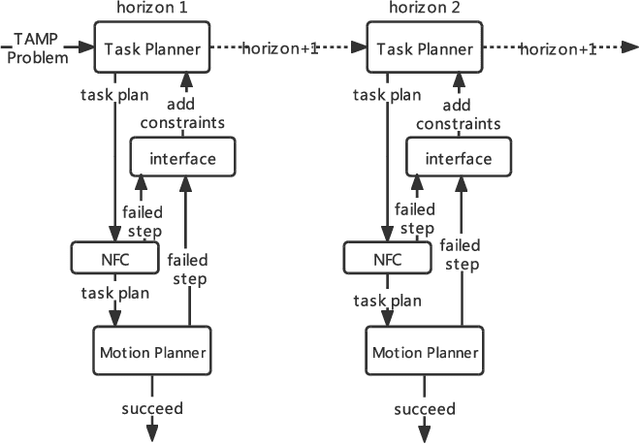
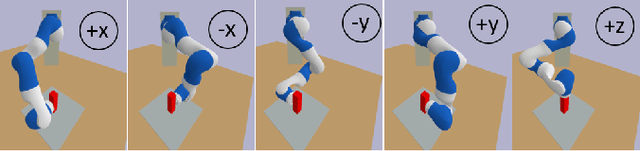
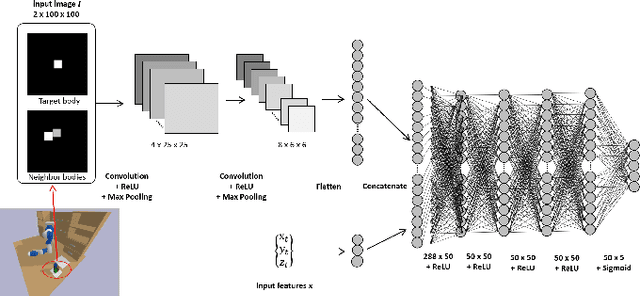
As robots play an increasingly important role in the industrial, the expectations about their applications for everyday living tasks are getting higher. Robots need to perform long-horizon tasks that consist of several sub-tasks that need to be accomplished. Task and Motion Planning (TAMP) provides a hierarchical framework to handle the sequential nature of manipulation tasks by interleaving a symbolic task planner that generates a possible action sequence, with a motion planner that checks the kinematic feasibility in the geometric world, generating robot trajectories if several constraints are satisfied, e.g., a collision-free trajectory from one state to another. Hence, the reasoning about the task plan's geometric grounding is taken over by the motion planner. However, motion planning is computationally intense and is usability as feasibility checker casts TAMP methods inapplicable to real-world scenarios. In this paper, we introduce neural feasibility classifier (NFC), a simple yet effective visual heuristic for classifying the feasibility of proposed actions in TAMP. Namely, NFC will identify infeasible actions of the task planner without the need for costly motion planning, hence reducing planning time in multi-step manipulation tasks. NFC encodes the image of the robot's workspace into a feature map thanks to convolutional neural network (CNN). We train NFC using simulated data from TAMP problems and label the instances based on IK feasibility checking. Our empirical results in different simulated manipulation tasks show that our NFC generalizes to the entire robot workspace and has high prediction accuracy even in scenes with multiple obstructions. When combined with state-of-the-art integrated TAMP, our NFC enhances its performance while reducing its planning time.