 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating combinatorial filter reduction through constraints
Paper and Code
Nov 06, 2020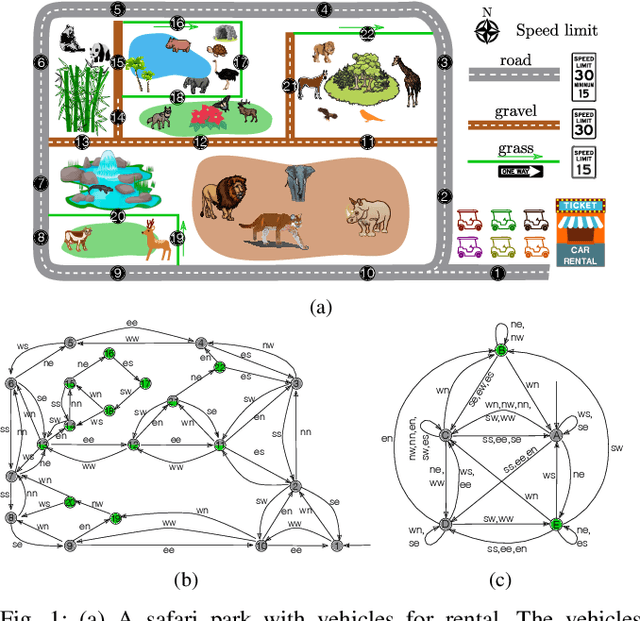
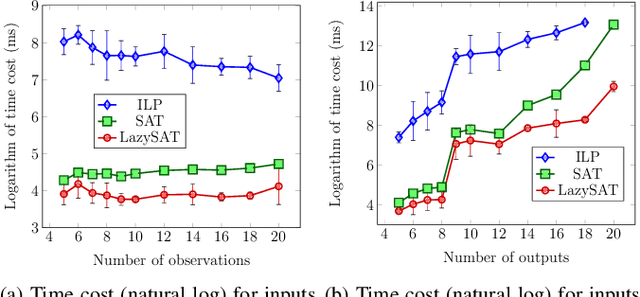
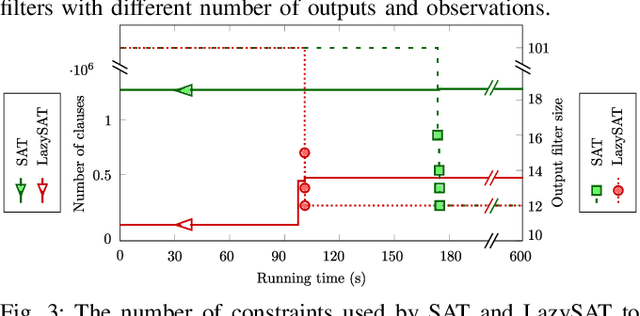
Reduction of combinatorial filters involves compressing state representations that robots use. Such optimization arises in automating the construction of minimalist robots. But exact combinatorial filter reduction is an NP-complete problem and all current techniques are either inexact or formalized with exponentially many constraints. This paper proposes a new formalization needing only a polynomial number of constraints, and characterizes these constraints in three different forms: nonlinear, linear, and conjunctive normal form. Empirical results show that constraints in conjunctive normal form capture the problem most effectively, leading to a method that outperforms the others. Further examination indicates that a substantial proportion of constraints remain inactive during iterative filter reduction. To leverage this observation, we introduce just-in-time generation of such constraints, which yields improvements in efficiency and has the potential to minimize large filters.