 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Virtual Reality-based Training and Assessment System for Bridge Inspectors with an Assistant Drone
Paper and Code
Sep 06, 2021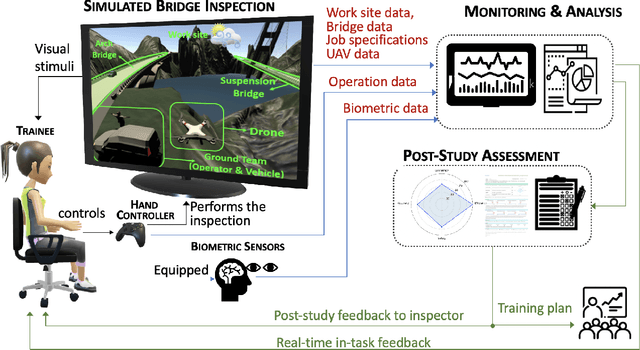
Over 600,000 bridges in the U.S. must be inspected every two years to identify flaws, defects, or potential problems that may need follow-up maintenance. An aerial robotic technology, Unmanned Aerial Vehicles (drones), has been adopted for bridge inspection for improving safety, efficiency, and cost-effectiveness. Although drones have an autonomous operation mode, keeping inspectors in the loop is still necessary for complex tasks like bridge inspection. Therefore, inspectors need to develop the skill and confidence in operating drones in their jobs. This paper presents the design and development of a virtual reality-based system for training inspectors who are assisted by a drone in the bridge inspection. The system is composed of four integrated modules: a simulated bridge inspection developed in Unity, an interface that allows a trainee to operate the drone in simulation using a remote controller, monitoring and analysis that analyzes data to provide real-time, in-task feedback to trainees to assist their learning, and a post-study assessment for accelerating the learning of trainees. The paper also conducts a small-size experimental study to illustrate the functionality of this system and its helpfulness for establishing the inspector-drone partnership. The developed system has built a modeling and analysis foundation for exploring advanced solutions to human-drone cooperative inspection and human sensor-based human-drone interaction.