 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Versatile Data-Driven Framework for Model-Independent Control of Continuum Manipulators Interacting With Obstructed Environments With Unknown Geometry and Stiffness
Paper and Code
May 05, 2020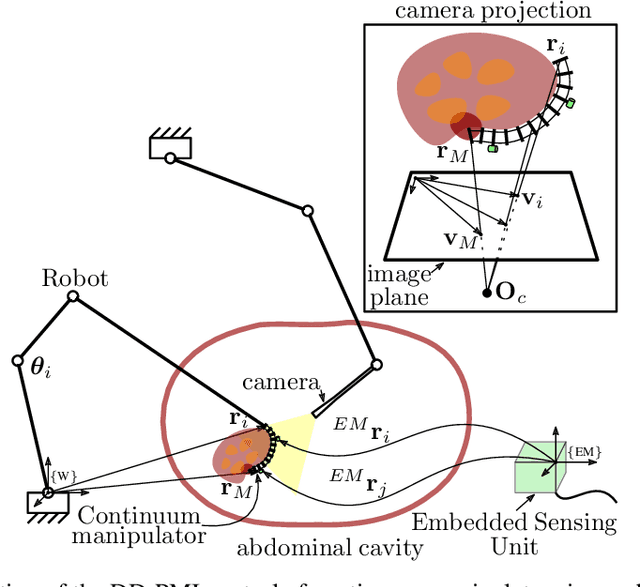
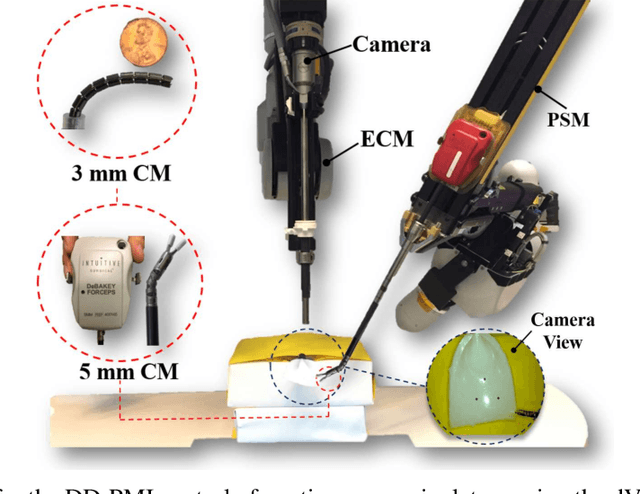

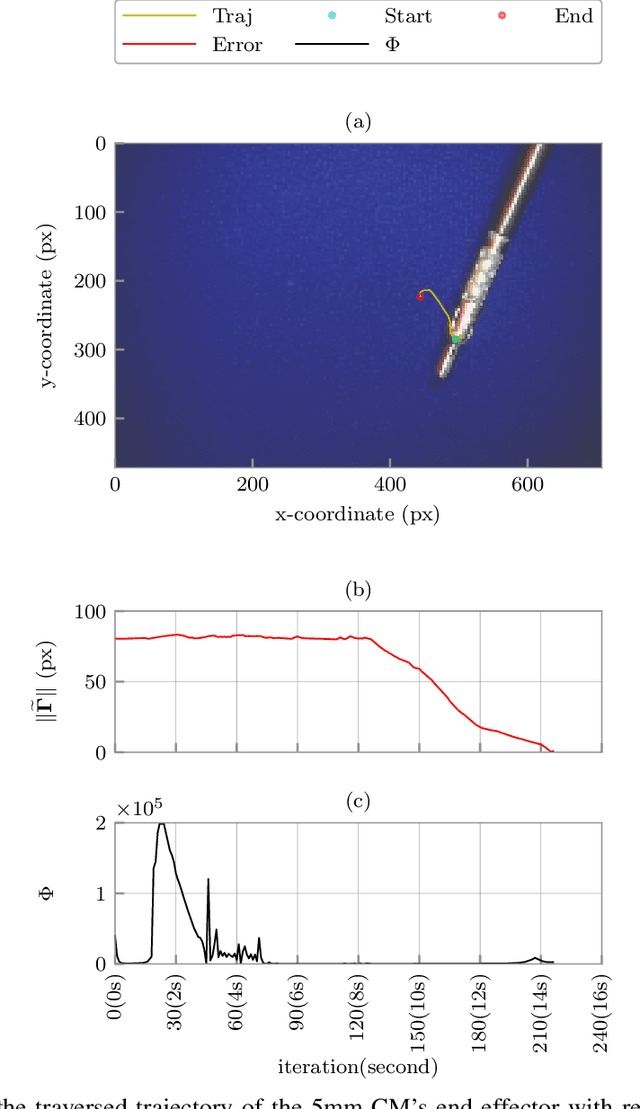
This paper addresses the problem of controlling a continuum manipulator (CM) in free or obstructed environments with no prior knowledge about the deformation behavior of the CM and the stiffness and geometry of the interacting obstructed environment. We propose a versatile data-driven priori-model-independent (PMI) control framework, in which various control paradigms (e.g. CM's position or shape control) can be defined based on the provided feedback. This optimal iterative algorithm learns the deformation behavior of the CM in interaction with an unknown environment, in real time, and then accomplishes the defined control objective. To evaluate the scalability of the proposed framework, we integrated two different CMs, designed for medical applications, with the da Vinci Research Kit (dVRK). The performance and learning capability of the framework was investigated in 11 sets of experiments including PMI position and shape control in free and unknown obstructed environments as well as during manipulation of an unknown deformable object. We also evaluated the performance of our algorithm in an ex-vivo experiment with a lamb heart.The theoretical and experimental results demonstrate the adaptivity, versatility, and accuracy of the proposed framework and, therefore, its suitability for a variety of applications involving continuum manipulators.