Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA variational approach to stable principal component pursuit
Paper and Code
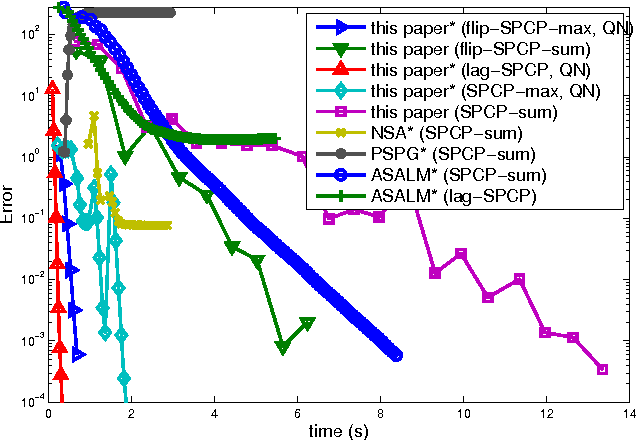
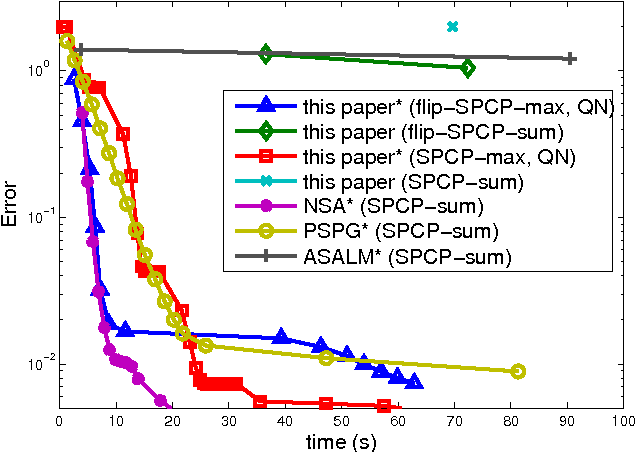

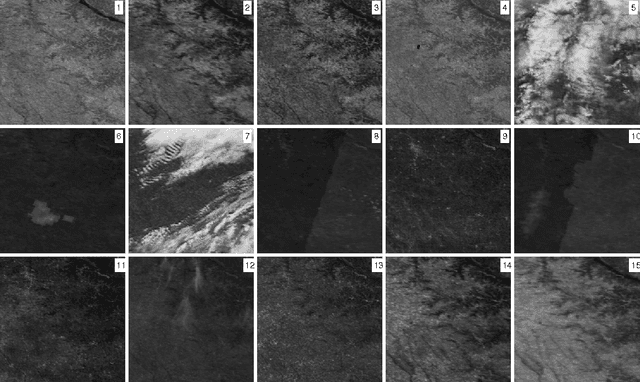
We introduce a new convex formulation for stable principal component pursuit (SPCP) to decompose noisy signals into low-rank and sparse representations. For numerical solutions of our SPCP formulation, we first develop a convex variational framework and then accelerate it with quasi-Newton methods. We show, via synthetic and real data experiments, that our approach offers advantages over the classical SPCP formulations in scalability and practical parameter selection.
* 10 pages, 5 figures
View paper on