 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified Bellman Optimality Principle Combining Reward Maximization and Empowerment
Paper and Code
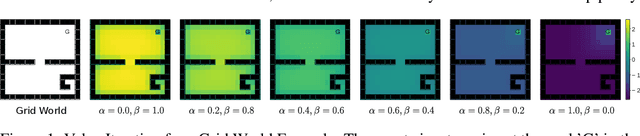
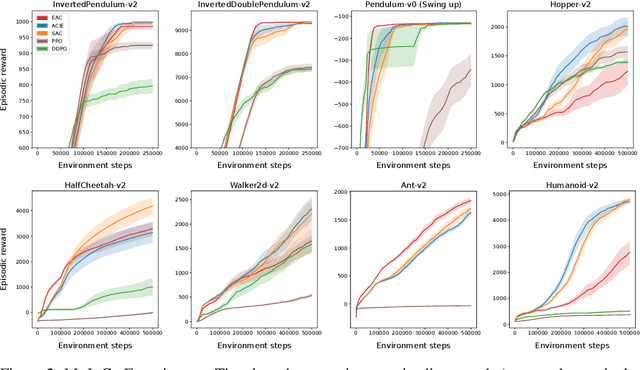
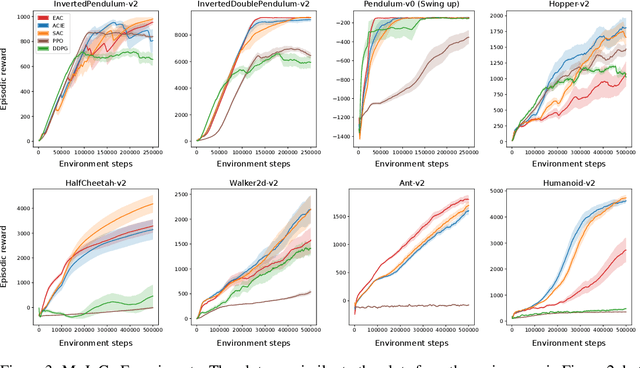
Empowerment is an information-theoretic method that can be used to intrinsically motivate learning agents. It attempts to maximize an agent's control over the environment by encouraging visiting states with a large number of reachable next states. Empowered learning has been shown to lead to complex behaviors, without requiring an explicit reward signal. In this paper, we investigate the use of empowerment in the presence of an extrinsic reward signal. We hypothesize that empowerment can guide reinforcement learning (RL) agents to find good early behavioral solutions by encouraging highly empowered states. We propose a unified Bellman optimality principle for empowered reward maximization. Our empowered reward maximization approach generalizes both Bellman's optimality principle as well as recent information-theoretical extensions to it. We prove uniqueness of the empowered values and show convergence to the optimal solution. We then apply this idea to develop off-policy actor-critic RL algorithms for high-dimensional continuous domains. We experimentally validate our methods in robotics domains (MuJoCo). Our methods demonstrate improved initial and competitive final performance compared to model-free state-of-the-art techniques.