 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA taxonomy of strategic human interactions in traffic conflicts
Paper and Code
Sep 29, 2021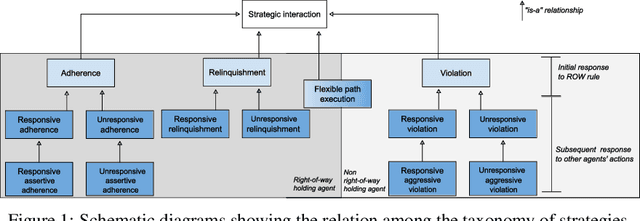
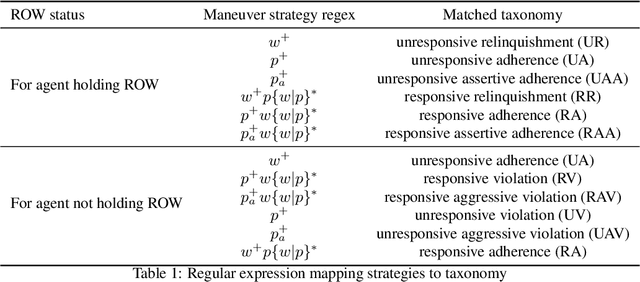
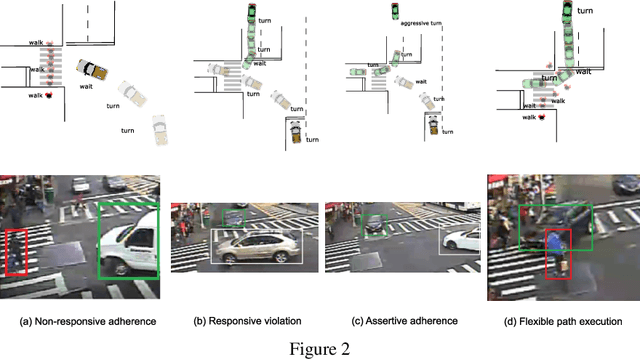
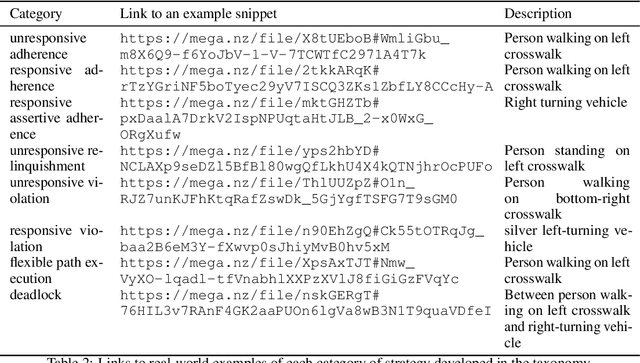
In order to enable autonomous vehicles (AV) to navigate busy traffic situations, in recent years there has been a focus on game-theoretic models for strategic behavior planning in AVs. However, a lack of common taxonomy impedes a broader understanding of the strategies the models generate as well as the development of safety specification to identity what strategies are safe for an AV to execute. Based on common patterns of interaction in traffic conflicts, we develop a taxonomy for strategic interactions along the dimensions of agents' initial response to right-of-way rules and subsequent response to other agents' behavior. Furthermore, we demonstrate a process of automatic mapping of strategies generated by a strategic planner to the categories in the taxonomy, and based on vehicle-vehicle and vehicle-pedestrian interaction simulation, we evaluate two popular solution concepts used in strategic planning in AVs, QLk and Subgame perfect $\epsilon$-Nash Equilibrium, with respect to those categories.