 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Soft-rigid Hybrid Actuator with Multi-direction Tunable Stiffness Property
Paper and Code
May 15, 2022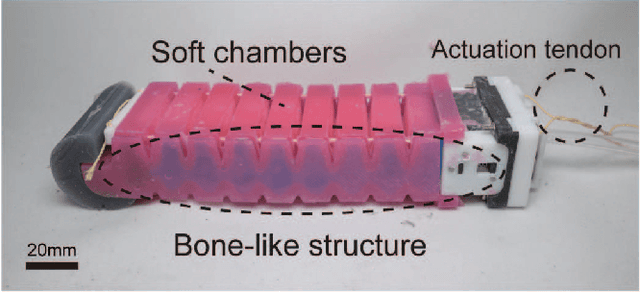

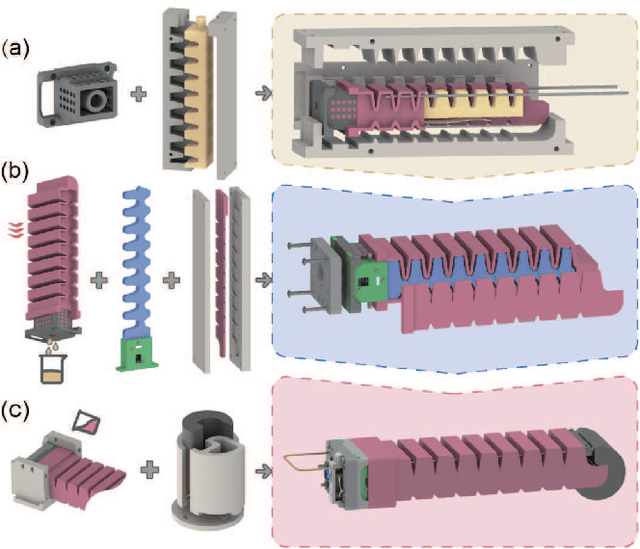
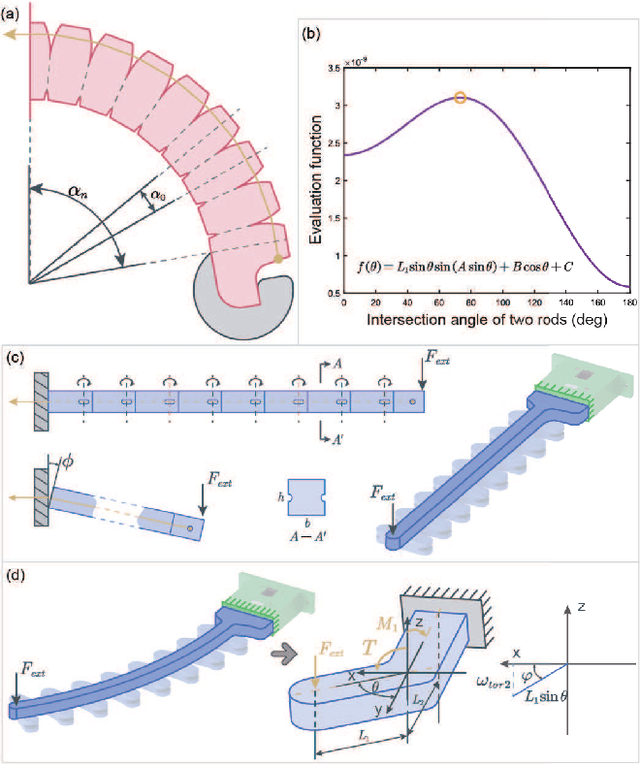
The ability to maintain compliance during interaction with the human or environments while avoiding the undesired destabilization could be extremely important for further application in practicality for soft actuators. In this paper, a soft-rigid hybrid actuator with multi-direction tunable stiffness property was proposed. The multi-direction tunable stiffness property, which means that the stiffness of multiple directions can be decoupled for modulation, was achieved in two orthogonal directions, the bending direction (B direction) and the direction perpendicular to bending (PB direction). In the B direction, the stiffness was modulated through the antagonistic effect of the tendon-air hybrid driven; In the PB direction, the jamming effect brought by a novel structure, the bone-like structure (BLS), reinforces the PB-direction stiffness. Meanwhile, in this paper, the corresponding fabrication method to ensure airtightness was designed, and the working principle for the two mechanisms of the actuator was evaluated. Finally, a series of experiments have been conducted to characterize the performance of the actuator and analyze the stiffness variation in two orthogonal directions. According to the tests, the maximum fingertip force reached 7.83N. And the experiments showed that stiffness in two directions can be tuned respectively. The B-direction stiffness can be tuned 1.5-4 times with a maximum stiffness of 1.24 N/mm. The PB-direction stiffness was enhanced about 4 times compared with the actuator without the mechanism, and it can be tuned decoupling with a range of 1.5 times.