 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Socially Assistive Robot using Automated Planning in a Paediatric Clinical Setting
Paper and Code
Oct 18, 2022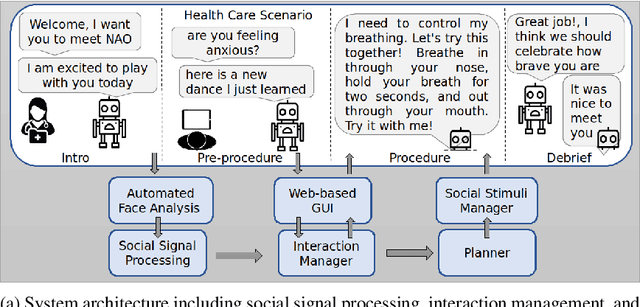
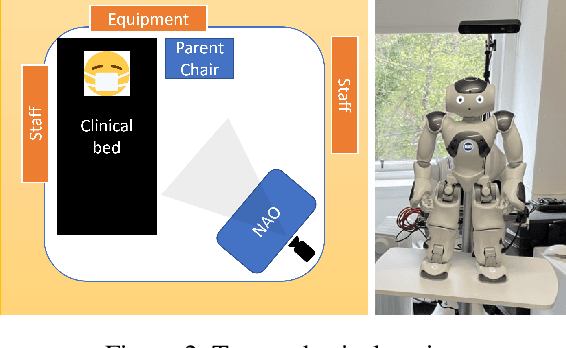
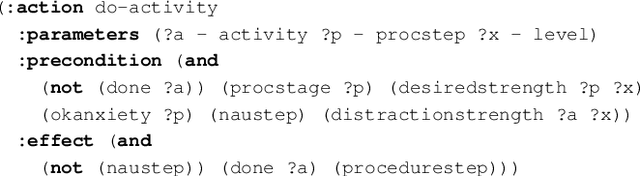
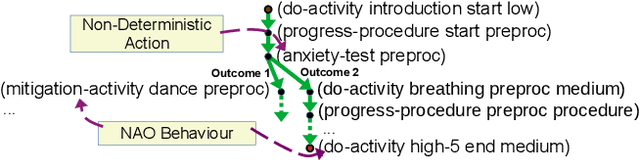
We present an ongoing project that aims to develop a social robot to help children cope with painful and distressing medical procedures in a clinical setting. Our approach uses automated planning as a core component for action selection in order to generate plans that include physical, sensory, and social actions for the robot to use when interacting with humans. A key capability of our system is that the robot's behaviour adapts based on the affective state of the child patient. The robot must operate in a challenging physical and social environment where appropriate and safe interaction with children, parents/caregivers, and healthcare professionals is crucial. In this paper, we present our system, examine some of the key challenges of the scenario, and describe how they are addressed by our system.