 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Smoothing Algorithm for Minimum Sensing Path Plans in Gaussian Belief Space
Paper and Code
Mar 13, 2023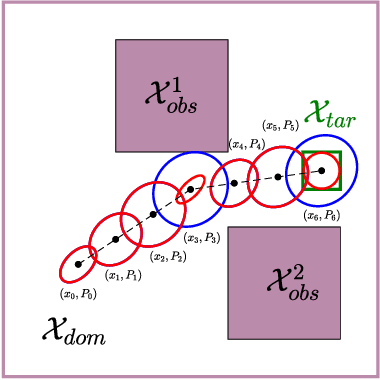
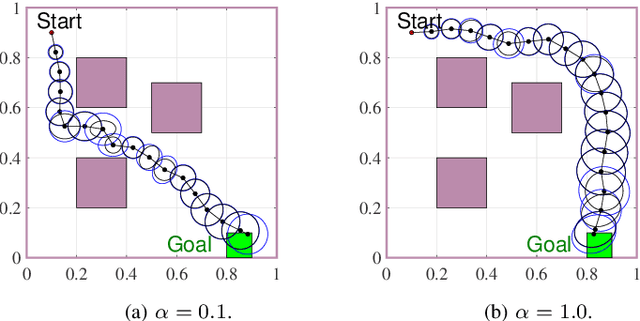
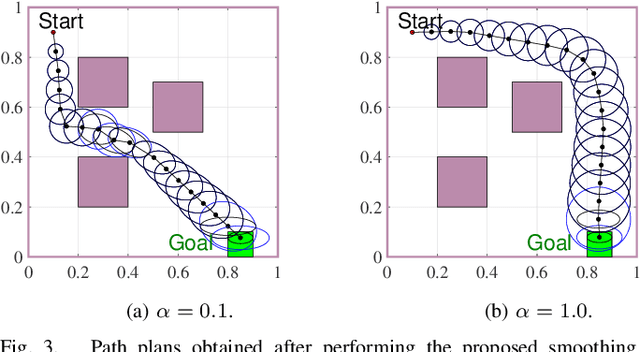
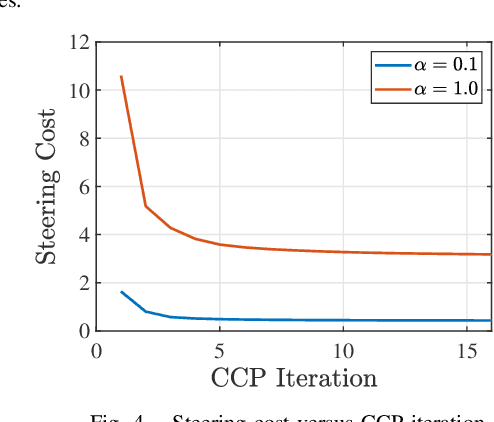
This paper explores minimum sensing navigation of robots in environments cluttered with obstacles. The general objective is to find a path plan to a goal region that requires minimal sensing effort. In [1], the information-geometric RRT* (IG-RRT*) algorithm was proposed to efficiently find such a path. However, like any stochastic sampling-based planner, the computational complexity of IG-RRT* grows quickly, impeding its use with a large number of nodes. To remedy this limitation, we suggest running IG-RRT* with a moderate number of nodes, and then using a smoothing algorithm to adjust the path obtained. To develop a smoothing algorithm, we explicitly formulate the minimum sensing path planning problem as an optimization problem. For this formulation, we introduce a new safety constraint to impose a bound on the probability of collision with obstacles in continuous-time, in contrast to the common discrete-time approach. The problem is amenable to solution via the convex-concave procedure (CCP). We develop a CCP algorithm for the formulated optimization and use this algorithm for path smoothing. We demonstrate the efficacy of the proposed approach through numerical simulations.