 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Single-Query Manipulation Planner
Paper and Code
Dec 17, 2015

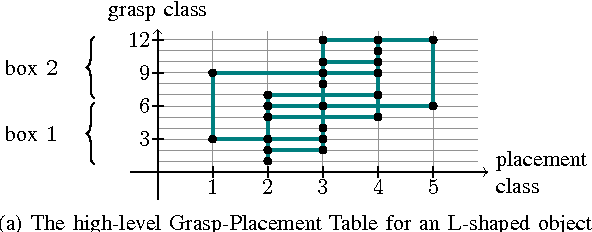
In manipulation tasks, a robot interacts with movable object(s). The configuration space in manipulation planning is thus the Cartesian product of the configuration space of the robot with those of the movable objects. It is the complex structure of such a "Composite Configuration Space" that makes manipulation planning particularly challenging. Previous works approximate the connectivity of the Composite Configuration Space by means of discretization or by creating random roadmaps. Such approaches involve an extensive pre-processing phase, which furthermore has to be re-done each time the environment changes. In this paper, we propose a high-level Grasp-Placement Table similar to that proposed by Tournassoud et al. (1987), but which does not require any discretization or heavy pre-processing. The table captures the potential connectivity of the Composite Configuration Space while being specific only to the movable object: in particular, it does not require to be re-computed when the environment changes. During the query phase, the table is used to guide a tree-based planner that explores the space systematically. Our simulations and experiments show that the proposed method enables improvements in both running time and trajectory quality as compared to existing approaches.