Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Simulation-based End-to-End Learning Framework for Evidential Occupancy Grid Mapping
Paper and Code
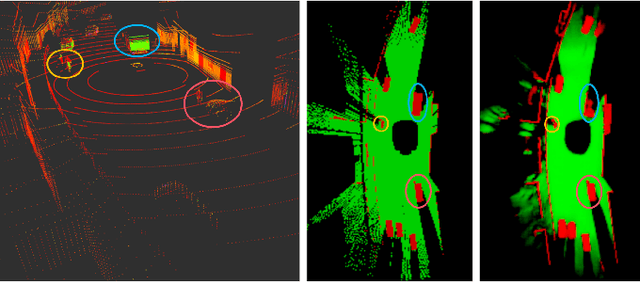
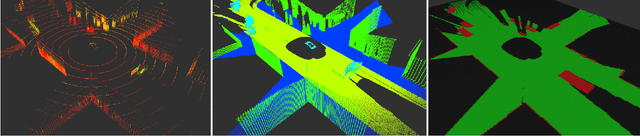
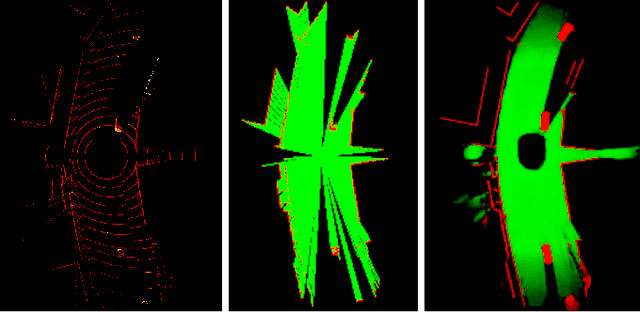
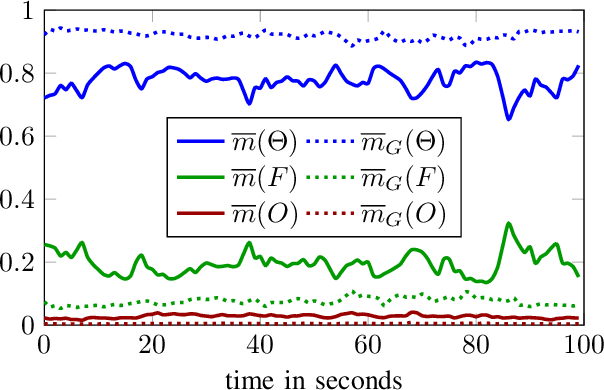
Evidential occupancy grid maps (OGMs) are a popular representation of the environment of automated vehicles. Inverse sensor models (ISMs) are used to compute OGMs from sensor data such as lidar point clouds. Geometric ISMs show a limited performance when estimating states in unobserved but inferable areas and have difficulties dealing with ambiguous input. Deep learning-based ISMs face the challenge of limited training data and they often cannot handle uncertainty quantification yet. We propose a deep learning-based framework for learning an OGM algorithm which is both capable of quantifying uncertainty and which does not rely on manually labeled data. Results on synthetic and on real-world data show superiority over other approaches.
* Submitted to 2021 IEEE Intelligent Vehicles Symposium (IV), Nagoya,
Japan, July 11-15, 2021
View paper on