 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Signal Temporal Logic Motion Planner for Bird Diverter Installation Tasks with Multi-Robot Aerial Systems
Paper and Code

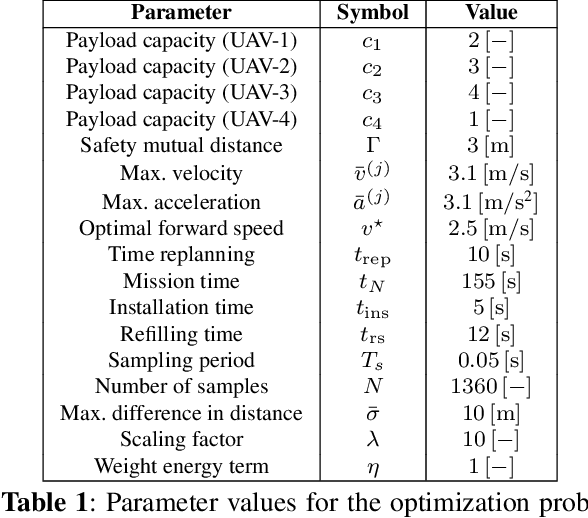

This paper investigates the problem of task assignment and trajectory generation for the installation of bird diverters with a fleet of multirotors leveraging on Signal Temporal Logic (STL) specifications. We extend our previous motion planner to compute feasible and constrained trajectories, taking into account payload capacity limitations and recharging constraints. The proposed planner ensures the continuity of the operation, while guaranteeing compliance with safety requirements and mission fulfillment. Additionally, an event-based replanning strategy is proposed to react to unforeseen failures. An energy minimization term is also considered to implicitly save multirotor flight time during installation operations. Numerical simulations in MATLAB, Gazebo, and field experiments demonstrate the performance of the approach and its validity in mock-up scenarios.