 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Semi-decentralized and Variational-Equilibrium-Based Trajectory Planner for Connected and Autonomous Vehicles
Paper and Code
Oct 20, 2024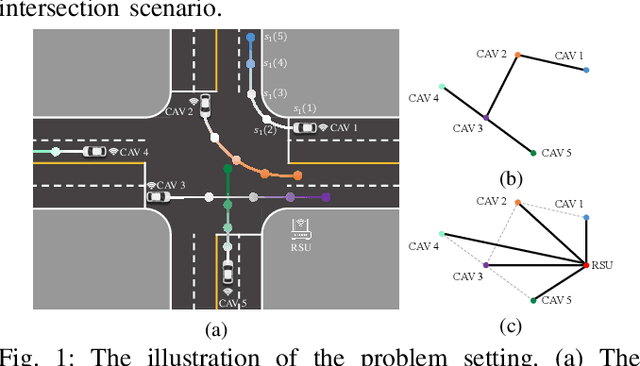
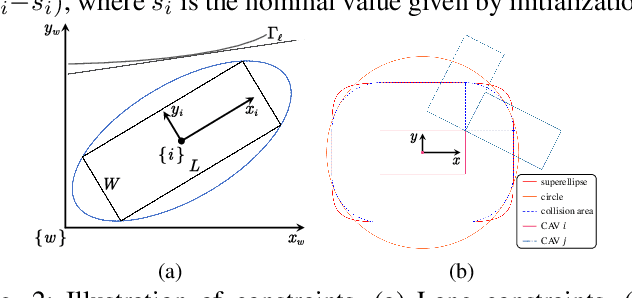
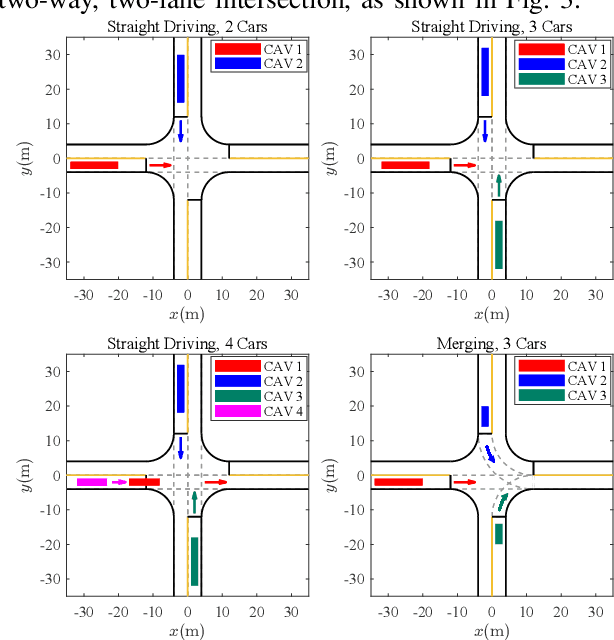
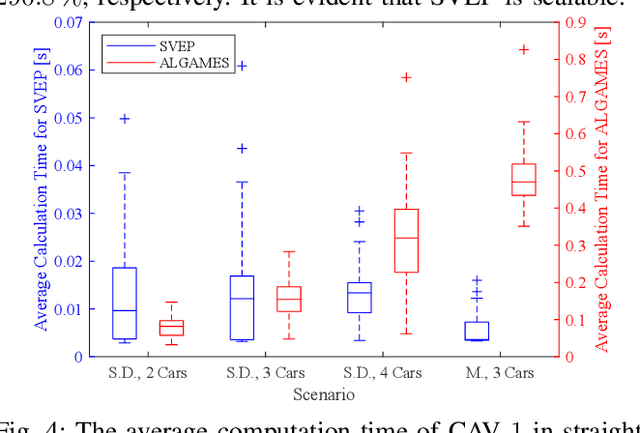
This paper designs a novel trajectory planning approach to resolve the computational efficiency and safety problems in uncoordinated methods by exploiting vehicle-to-everything (V2X) technology. The trajectory planning for connected and autonomous vehicles (CAVs) is formulated as a game with coupled safety constraints. We then define interaction-fair trajectories and prove that they correspond to the variational equilibrium (VE) of this game. We propose a semi-decentralized planner for the vehicles to seek VE-based fair trajectories, which can significantly improve computational efficiency through parallel computing among CAVs and enhance the safety of planned trajectories by ensuring equilibrium concordance among CAVs. Finally, experimental results show the advantages of the approach, including fast computation speed, high scalability, equilibrium concordance, and safety.