Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Lane Detection Associated with Quaternion Hardy Filter
Paper and Code
Aug 06, 2021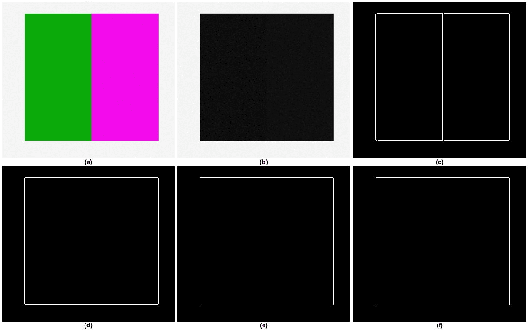
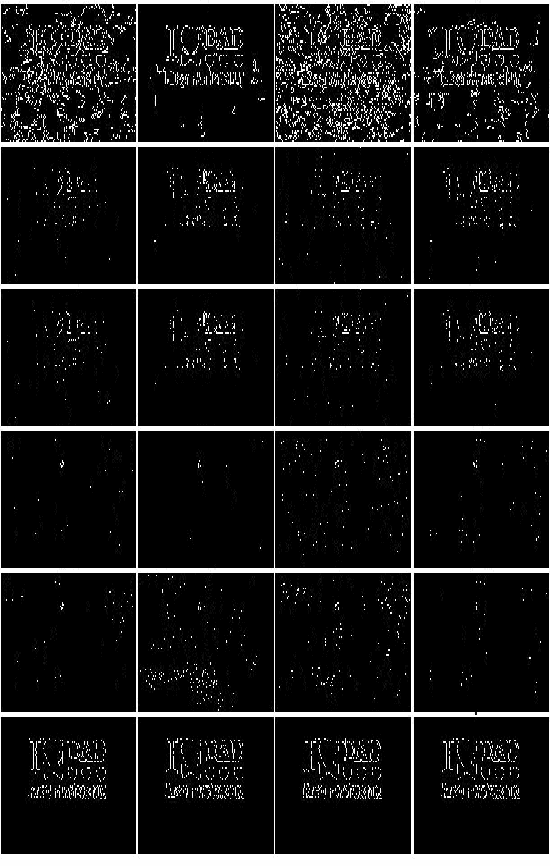
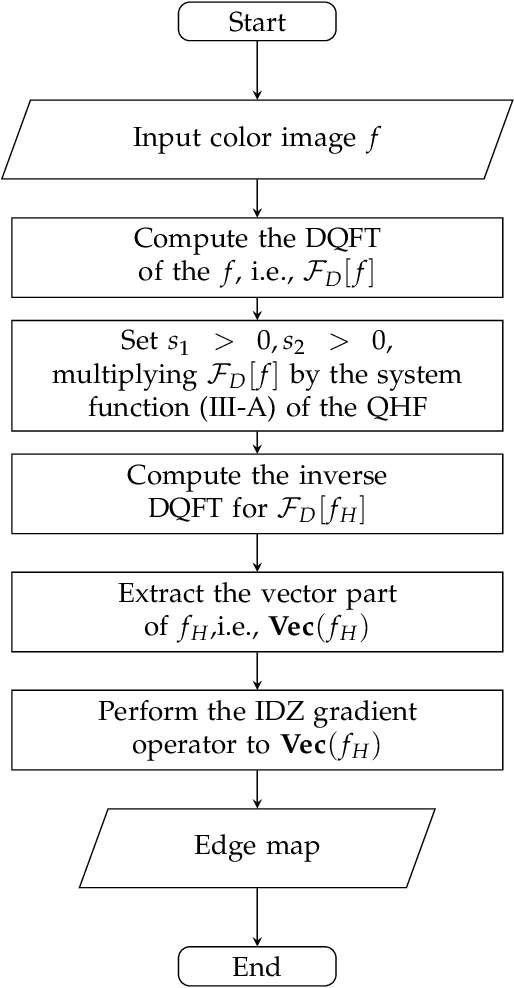
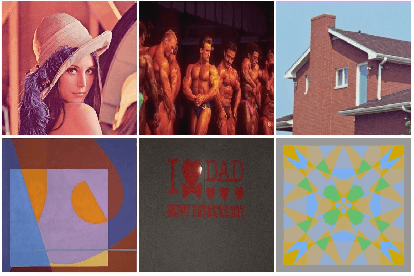
In this article, a robust color-edge feature extraction method based on the Quaternion Hardy filter is proposed. The Quaternion Hardy filter is an emerging edge detection theory. It is along with the Poisson and conjugate Poisson smoothing kernels to handle various types of noise. Combining with the Quaternion Hardy filter, Jin's color gradient operator and Hough transform, the color-edge feature detection algorithm is proposed and applied to the lane marking detection. Experiments are presented to demonstrate the validity of the proposed algorithm. The results are accurate and robust with respect to the complex environment lane markings.
View paper on