 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Biped Locomotion Based on Linear-Quadratic-Gaussian Controller and Divergent Component of Motion
Paper and Code
Jun 21, 2019

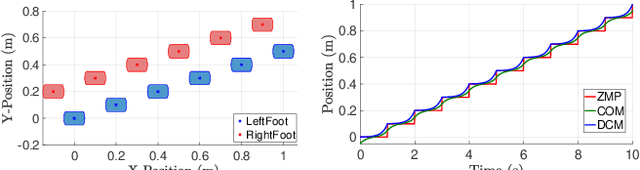
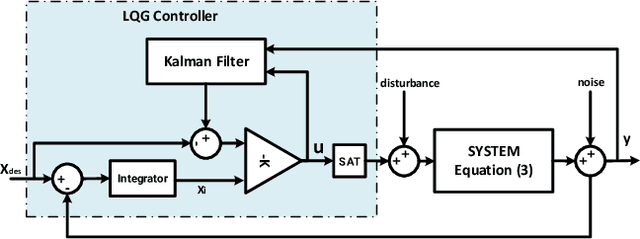
Generating robust locomotion for a humanoid robot in the presence of disturbances is difficult because of its high number of degrees of freedom and its unstable nature. In this paper, we used the concept of Divergent Component of Motion~(DCM) and propose an optimal closed-loop controller based on Linear-Quadratic-Gaussian to generate a robust and stable walking for humanoid robots. The biped robot dynamics has been approximated using the Linear Inverted Pendulum Model~(LIPM). Moreover, we propose a controller to adjust the landing location of the swing leg to increase the withstanding level of the robot against a severe external push. The performance and also the robustness of the proposed controller is analyzed and verified by performing a set of simulations using~\mbox{MATLAB}. The simulation results showed that the proposed controller is capable of providing a robust walking even in the presence of disturbances and in challenging situations.