 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA representation of robotic behaviors using component port arbitration
Paper and Code
Dec 16, 2014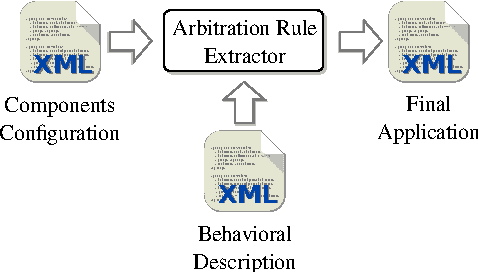
Developing applications considering reactiveness, scalability and re-usability has always been at the center of attention of robotic researchers. Behavior-based architectures have been proposed as a programming paradigm to develop robust and complex behaviors as integration of simpler modules whose activities are directly modulated by sensory feedback or input from other models. The design of behavior based systems, however, becomes increasingly difficult as the complexity of the application grows. This article proposes an approach for modeling and coordinating behaviors in distributed architectures based on port arbitration which clearly separates representation of the behaviors from the composition of the software components. Therefore, based on different behavioral descriptions, the same software components can be reused to implement different applications.