 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Reinforcement Learning Approach to Non-prehensile Manipulation through Sliding
Paper and Code
Feb 24, 2025


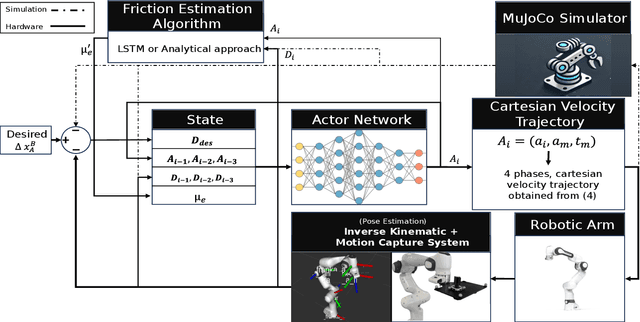
Although robotic applications increasingly demand versatile and dynamic object handling, most existing techniques are predominantly focused on grasp-based manipulation, limiting their applicability in non-prehensile tasks. To address this need, this study introduces a Deep Deterministic Policy Gradient (DDPG) reinforcement learning framework for efficient non-prehensile manipulation, specifically for sliding an object on a surface. The algorithm generates a linear trajectory by precisely controlling the acceleration of a robotic arm rigidly coupled to the horizontal surface, enabling the relative manipulation of an object as it slides on top of the surface. Furthermore, two distinct algorithms have been developed to estimate the frictional forces dynamically during the sliding process. These algorithms provide online friction estimates after each action, which are fed back into the actor model as critical feedback after each action. This feedback mechanism enhances the policy's adaptability and robustness, ensuring more precise control of the platform's acceleration in response to varying surface condition. The proposed algorithm is validated through simulations and real-world experiments. Results demonstrate that the proposed framework effectively generalizes sliding manipulation across varying distances and, more importantly, adapts to different surfaces with diverse frictional properties. Notably, the trained model exhibits zero-shot sim-to-real transfer capabilities.