 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Real-Time Receding Horizon Sequence Planner for Disassembly in A Human-Robot Collaboration Setting
Paper and Code
Jul 06, 2020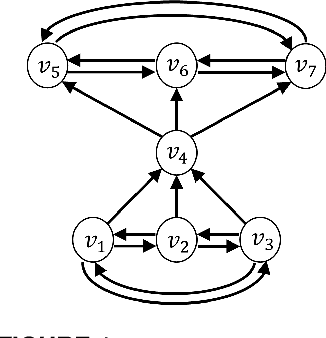


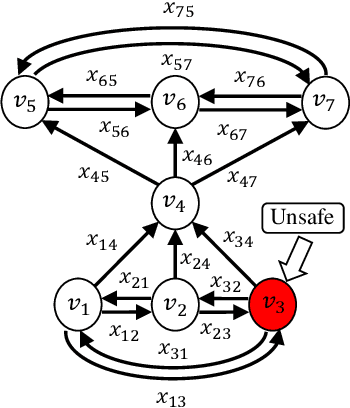
Product disassembly is a labor-intensive process and is far from being automated. Typically, disassembly is not robust enough to handle product varieties from different shapes, models, and physical uncertainties due to component imperfections, damage throughout component usage, or insufficient product information. To overcome these difficulties and to automate the disassembly procedure through human-robot collaboration without excessive computational cost, this paper proposes a real-time receding horizon sequence planner that distributes tasks between robot and human operator while taking real-time human motion into consideration. The sequence planner aims to address several issues in the disassembly line, such as varying orientations, safety constraints of human operators, uncertainty of human operation, and the computational cost of large number of disassembly tasks. The proposed disassembly sequence planner identifies both the positions and orientations of the to-be-disassembled items, as well as the locations of human operator, and obtains an optimal disassembly sequence that follows disassembly rules and safety constraints for human operation. Experimental tests have been conducted to validate the proposed planner: the robot can locate and disassemble the components following the optimal sequence, and consider explicitly human operator's real-time motion, and collaborate with the human operator without violating safety constraints.