 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Practical Guide to Studying Emergent Communication through Grounded Language Games
Paper and Code
Apr 20, 2020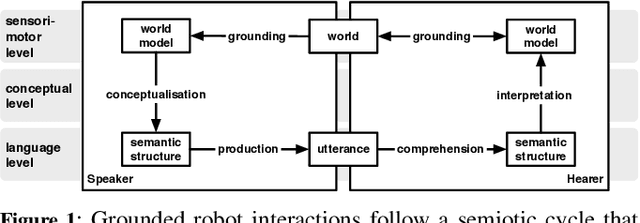
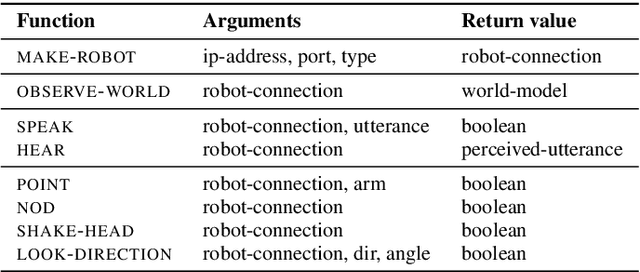
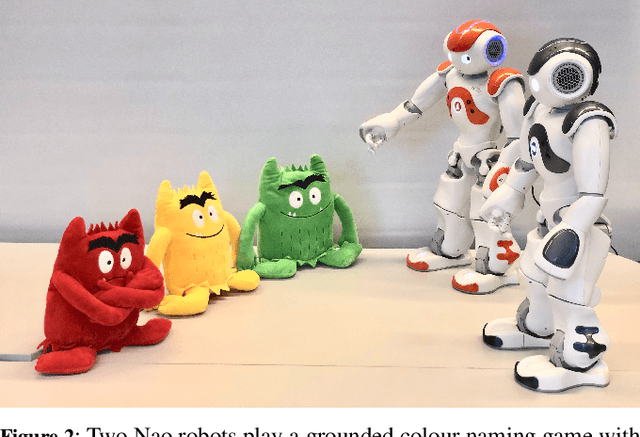
The question of how an effective and efficient communication system can emerge in a population of agents that need to solve a particular task attracts more and more attention from researchers in many fields, including artificial intelligence, linguistics and statistical physics. A common methodology for studying this question consists of carrying out multi-agent experiments in which a population of agents takes part in a series of scripted and task-oriented communicative interactions, called 'language games'. While each individual language game is typically played by two agents in the population, a large series of games allows the population to converge on a shared communication system. Setting up an experiment in which a rich system for communicating about the real world emerges is a major enterprise, as it requires a variety of software components for running multi-agent experiments, for interacting with sensors and actuators, for conceptualising and interpreting semantic structures, and for mapping between these semantic structures and linguistic utterances. The aim of this paper is twofold. On the one hand, it introduces a high-level robot interface that extends the Babel software system, presenting for the first time a toolkit that provides flexible modules for dealing with each subtask involved in running advanced grounded language game experiments. On the other hand, it provides a practical guide to using the toolkit for implementing such experiments, taking a grounded colour naming game experiment as a didactic example.