 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Poisson multi-Bernoulli mixture filter for coexisting point and extended targets
Paper and Code
Nov 09, 2020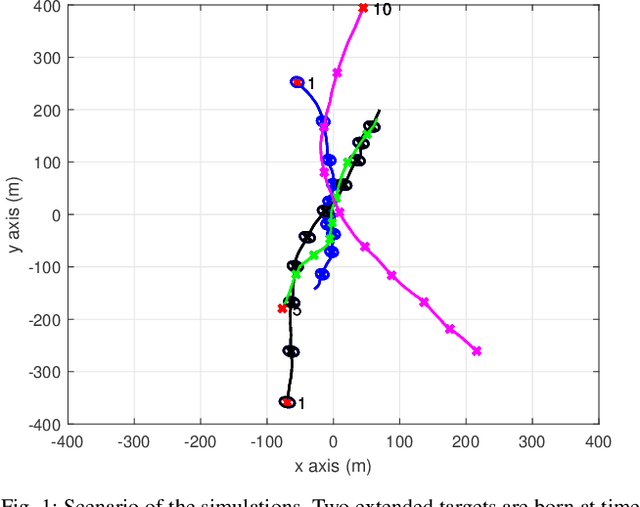
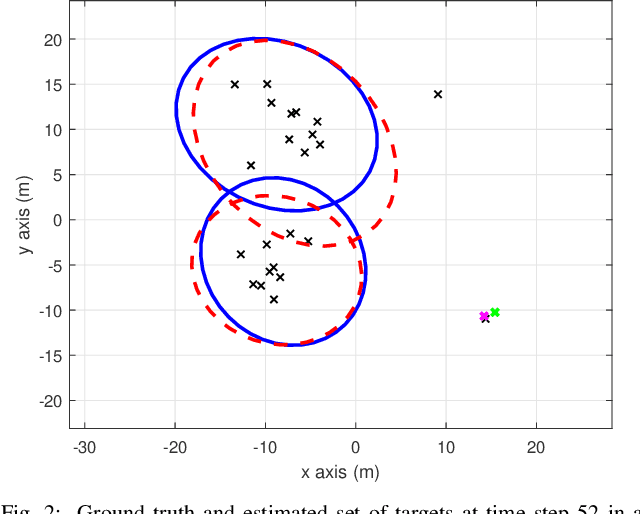
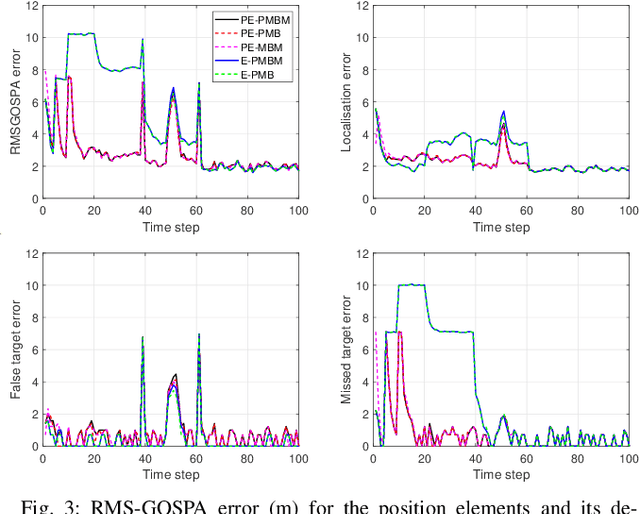

This paper proposes a Poisson multi-Bernoulli mixture (PMBM) filter for coexisting point and extended targets. The PMBM filter provides a recursion to compute the filtering posterior based on single-target predictions and updates. In this paper, we first derive the PMBM filter update for a generalised measurement model, which can include measurements originated from point and extended targets. Second, we propose a single-target space that accommodates both point and extended targets and derive the filtering recursion that propagates Gaussian densities for single targets and gamma Gaussian inverse Wishart densities for extended targets. As a computationally efficient approximation of the PMBM filter, we also develop a Poisson multi-Bernoulli (PMB) filter for coexisting point and extended targets. The resulting filters are analysed via numerical simulations.