 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Method for the Extrinsic Calibration of a 2D Laser Rangefinder and a Camera
Paper and Code
Aug 31, 2018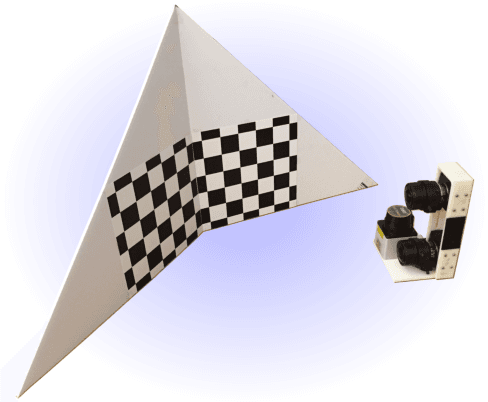
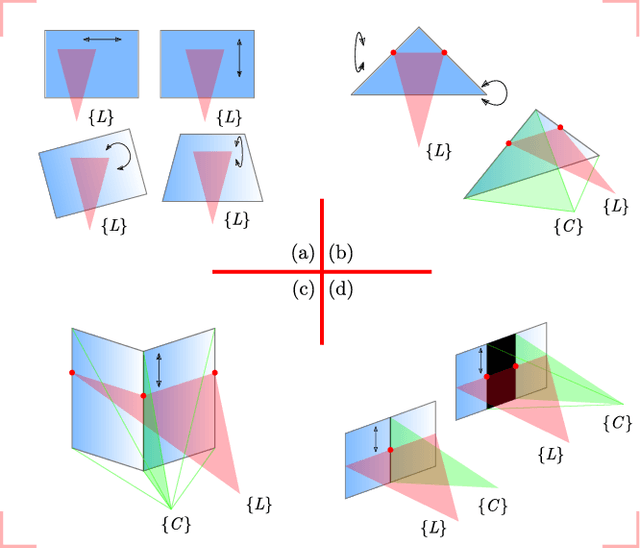
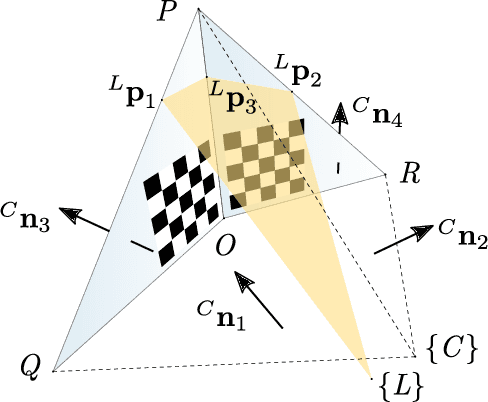
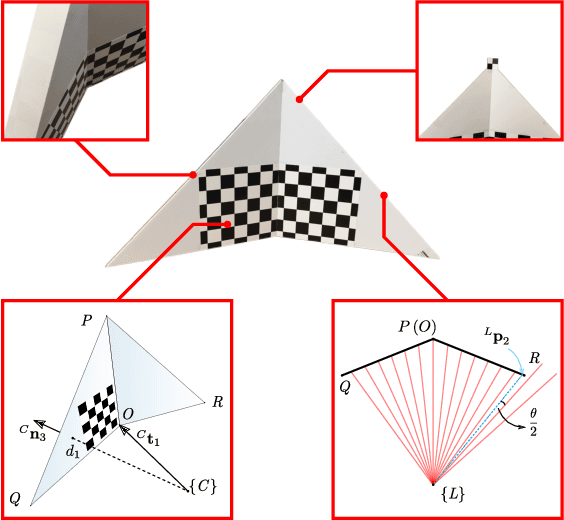
We present a novel method for extrinsically calibrating a camera and a 2D Laser Rangefinder (LRF) whose beams are invisible from the camera image. We show that point-to-plane constraints from a single observation of a V-shaped calibration pattern composed of two non-coplanar triangles suffice to uniquely constrain the relative pose between two sensors. Next, we present an approach to obtain analytical solutions using point-to-plane constraints from single or multiple observations. Along the way, we also show that previous solutions, in contrast to our method, have inherent ambiguities and therefore must rely on a good initial estimate. Real and synthetic experiments validate our method and show that it achieves better accuracy than previous methods.