 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Grip Force Measurement Concept for Tactile Stimulation Mechanisms -- Design, Validation, and User Study
Paper and Code
Jun 07, 2020
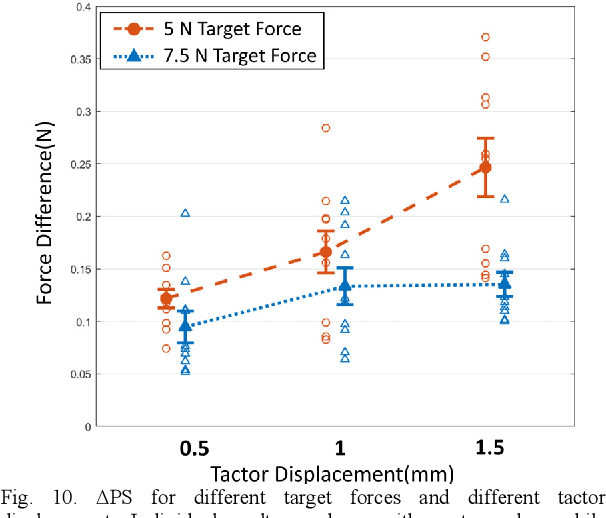
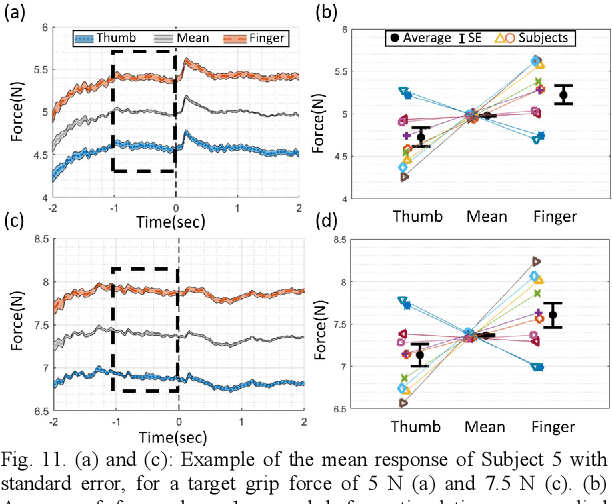
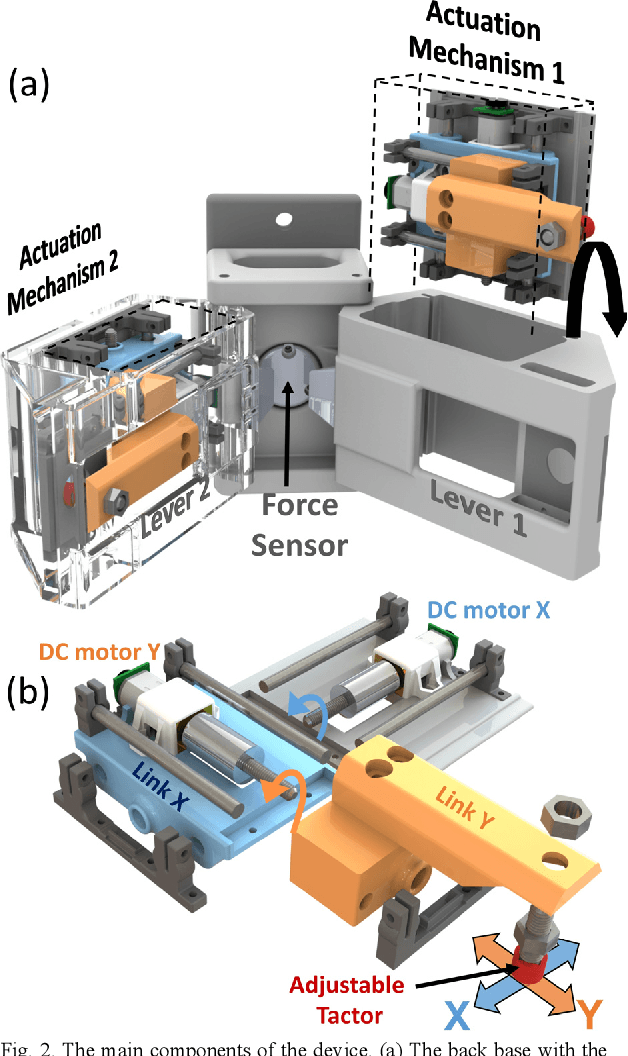
We developed a new grip force measurement concept that allows for embedding tactile stimulation mechanisms in a gripper. This concept is based on a single force sensor to measure the force applied on each side of the gripper, and it substantially reduces artifacts of force measurement caused by tactor motion. To test the feasibility of this new concept, we built a device that measures control of grip force in response to a tactile stimulation from a moving tactor. First, we used a custom designed testing setup with a second force sensor to calibrate our device over a range of 0 to 20 N without movement of the tactors. Second, we tested the effect of tactor movement on the measured grip force and measured artifacts of 1% of the measured force. Third, we demonstrated that during the application of dynamically changing grip forces, the average errors were 2.9% and 3.7% for the left and right sides of the gripper, respectively. Finally, we conducted a user study and found that in response to tactor movement, participants increased their grip force, and that the increase was larger for a smaller target force and depended on the amount of tactile stimulation.