 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New TOA Localization and Synchronization System with Virtually Synchronized Periodic Asymmetric Ranging Network
Paper and Code
Mar 17, 2021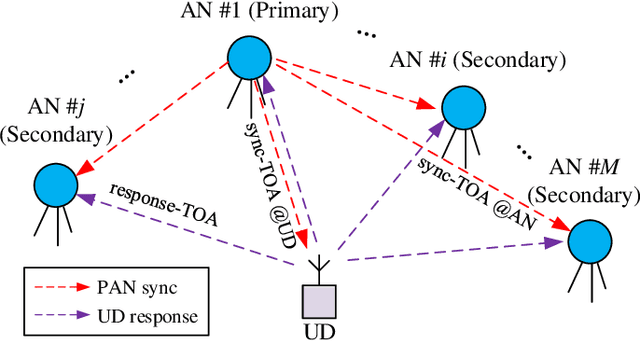
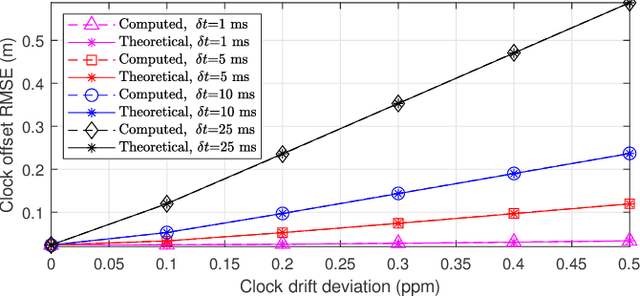
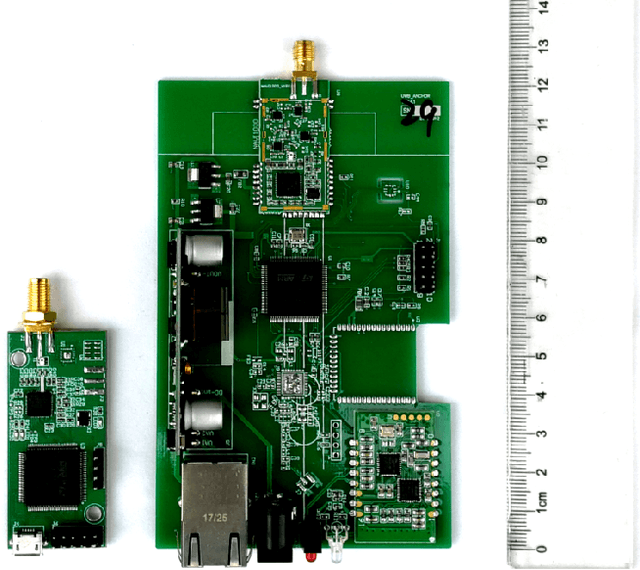
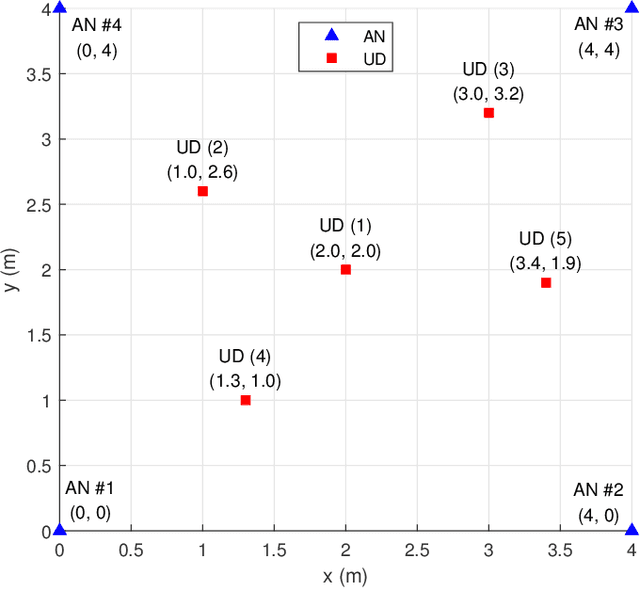
In this article, we design a new time-of-arrival (TOA) system for simultaneous user device (UD) localization and synchronization with a periodic asymmetric ranging network, namely PARN. The PARN includes one primary anchor node (PAN) transmitting and receiving signals, and many secondary ANs (SAN) only receiving signals. All the UDs can transmit and receive signals. The PAN periodically transmits sync signal and the UD transmits response signal after reception of the sync signal. Using TOA measurements from the periodic sync signal at SANs, we develop a Kalman filtering method to virtually synchronize ANs with high accuracy estimation of clock parameters. Employing the virtual synchronization, and TOA measurements from the response signal and sync signal, we then develop a maximum likelihood (ML) approach, namely ML-LAS, to simultaneously localize and synchronize a moving UD. We analyze the UD localization and synchronization error, and derive the Cramer-Rao lower bound (CRLB). Different from existing asymmetric ranging network-based TOA systems, the new PARN i) uses the periodic sync signals at the SAN to exploit the temporal correlated clock information for high accuracy virtual synchronization, and ii) compensates the UD movement and clock drift using various TOA measurements to achieve consistent and simultaneous localization and synchronization performance. Numerical results verify the theoretical analysis that the new system has high accuracy in AN clock offset estimation and simultaneous localization and synchronization for a moving UD. We implement a prototype hardware system and demonstrate the feasibility and superiority of the PARN in real-world applications by experiments.