 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Neural Height-Map Approach for the Binocular Photometric Stereo Problem
Paper and Code
Nov 10, 2023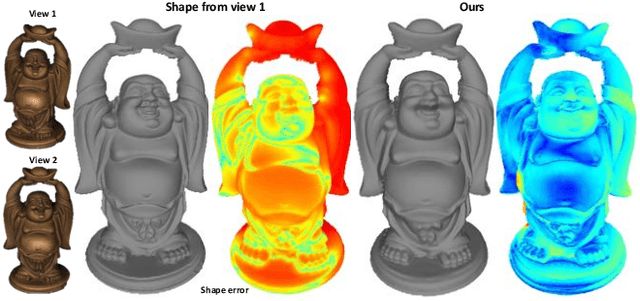
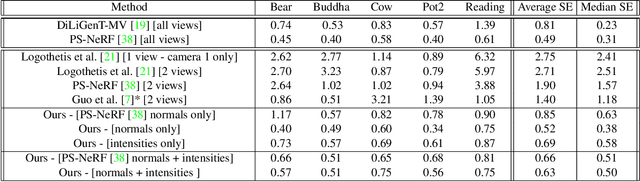
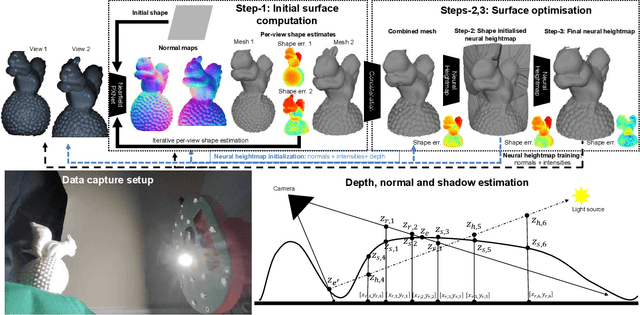
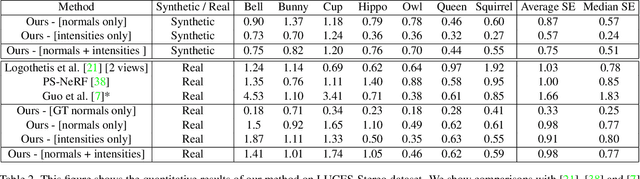
In this work we propose a novel, highly practical, binocular photometric stereo (PS) framework, which has same acquisition speed as single view PS, however significantly improves the quality of the estimated geometry. As in recent neural multi-view shape estimation frameworks such as NeRF, SIREN and inverse graphics approaches to multi-view photometric stereo (e.g. PS-NeRF) we formulate shape estimation task as learning of a differentiable surface and texture representation by minimising surface normal discrepancy for normals estimated from multiple varying light images for two views as well as discrepancy between rendered surface intensity and observed images. Our method differs from typical multi-view shape estimation approaches in two key ways. First, our surface is represented not as a volume but as a neural heightmap where heights of points on a surface are computed by a deep neural network. Second, instead of predicting an average intensity as PS-NeRF or introducing lambertian material assumptions as Guo et al., we use a learnt BRDF and perform near-field per point intensity rendering. Our method achieves the state-of-the-art performance on the DiLiGenT-MV dataset adapted to binocular stereo setup as well as a new binocular photometric stereo dataset - LUCES-ST.