 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Model Predictive Approach for Online Mobile Manipulation of Nonholonomic Objects using Learned Dynamics
Paper and Code
Dec 19, 2019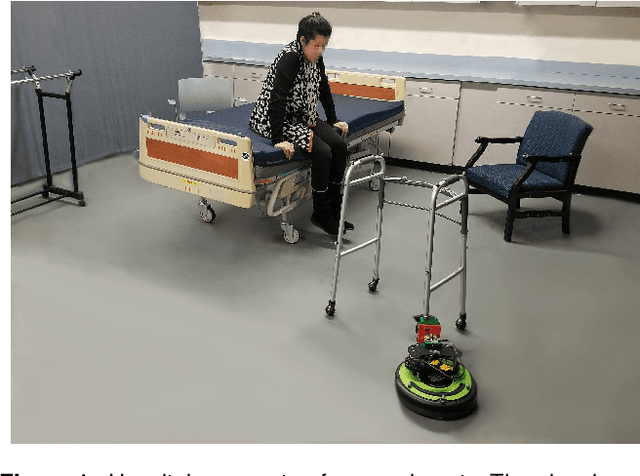
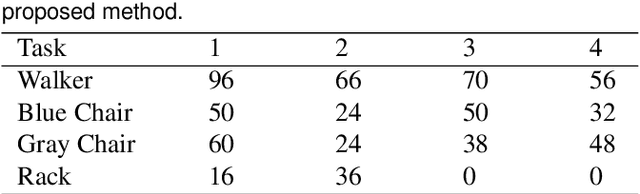
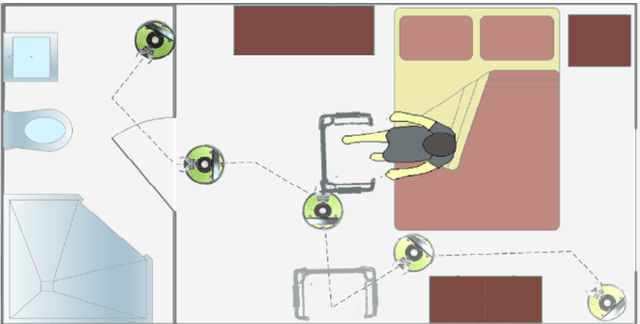
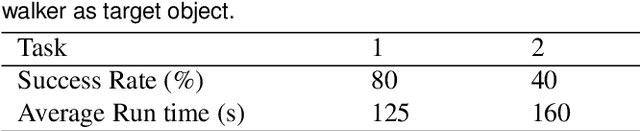
A particular type of assistive robots designed for physical interaction with objects could play an important role assisting with mobility and fall prevention in healthcare facilities. Autonomous mobile manipulation presents a hurdle prior to safely using robots in real life applications. In this article, we introduce a mobile manipulation framework based on model predictive control using learned dynamics models of objects. We focus on the specific problem of manipulating legged objects such as those commonly found in healthcare environments and personal dwellings (e.g. walkers, tables, chairs). We describe a probabilistic method for autonomous learning of an approximate dynamics model for these objects. In this method, we learn dynamic parameters using a small dataset consisting of force and motion data from interactions between the robot and object. Moreover, we account for multiple manipulation strategies by formulating the manipulation planning as a mixed-integer convex optimization. The proposed framework considers the hybrid control system comprised of i) choosing which leg to grasp, and ii) control of continuous applied forces for manipulation. We formalize our algorithm based on model predictive control to compensate for modeling errors and find an optimal path to manipulate the object from one configuration to another. We show results for several objects with various wheel configurations. Simulation and physical experiments show that the obtained dynamics models are sufficiently accurate for safe and collision-free manipulation. When combined with the proposed manipulation planning algorithm, the robot successfully moves the object to a desired pose while avoiding collision.